










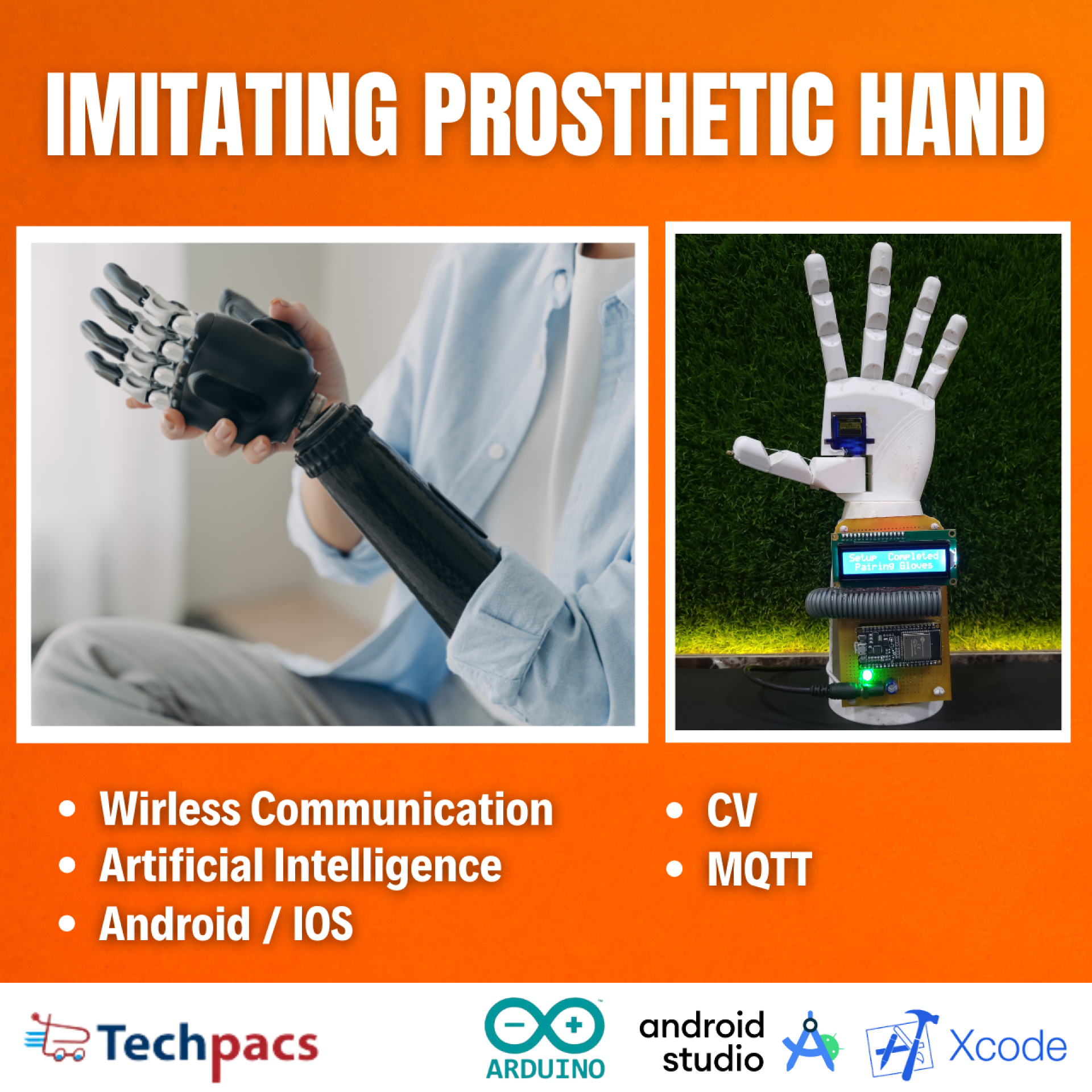

ESP32-Powered Prosthetic Hand for Mimicking Human Hand Movements
The ESP32-Powered Prosthetic Hand is a groundbreaking project aimed at creating a cutting-edge prosthetic hand that closely mimics human hand movements. Utilizing the ESP32 microcontroller, known for its robust processing power and Wi-Fi capabilities, this project leverages advanced sensors, servo motors, and programming algorithms to replicate the complex motions of a human hand. The prosthetic is designed to improve the quality of life for individuals with amputations or disabilities, offering them better control, precision, and sensitivity in hand movements. This project stands at the intersection of medical technology and robotics, promising significant advancements in the field of prosthetics.
Objectives
1. To develop an ESP32-based prosthetic hand capable of performing complex hand movements.
2. To enhance the precision and responsiveness of prosthetic hand movements using advanced sensors and actuators.
3. To integrate a user-friendly interface for easy control and adjustment of the prosthetic hand.
4. To ensure the prosthetic hand is lightweight, durable, and comfortable for the user.
5. To make the prosthetic hand affordable and accessible to a wide range of users.
Key Features
1. Robust ESP32 microcontroller for processing and wireless communication.
2. High-precision sensors to capture and replicate hand movements accurately.
3. Multiple servo motors to ensure smooth and complex movements.
4. User-friendly interface with an integrated LCD display for real-time monitoring and adjustments.
5. Lightweight and ergonomic design for improved comfort and usability.
Application Areas
The ESP32-Powered Prosthetic Hand has a wide range of applications primarily in the field of medical prosthetics. It serves as an advanced solution for individuals with hand amputations, allowing them to regain hand functionality and perform daily tasks with greater ease and precision. Additionally, it finds application in rehabilitation centers where it can be used as a training tool for patients undergoing hand movement therapy. Beyond medical applications, it can be utilized in robotics research and development, providing valuable insights into the replication of human movements for robotic systems. The project also holds potential for use in educational settings, offering students and researchers a practical example of integrating technology with human physiology.
Detailed Working of ESP32-Powered Prosthetic Hand for Mimicking Human Hand Movements
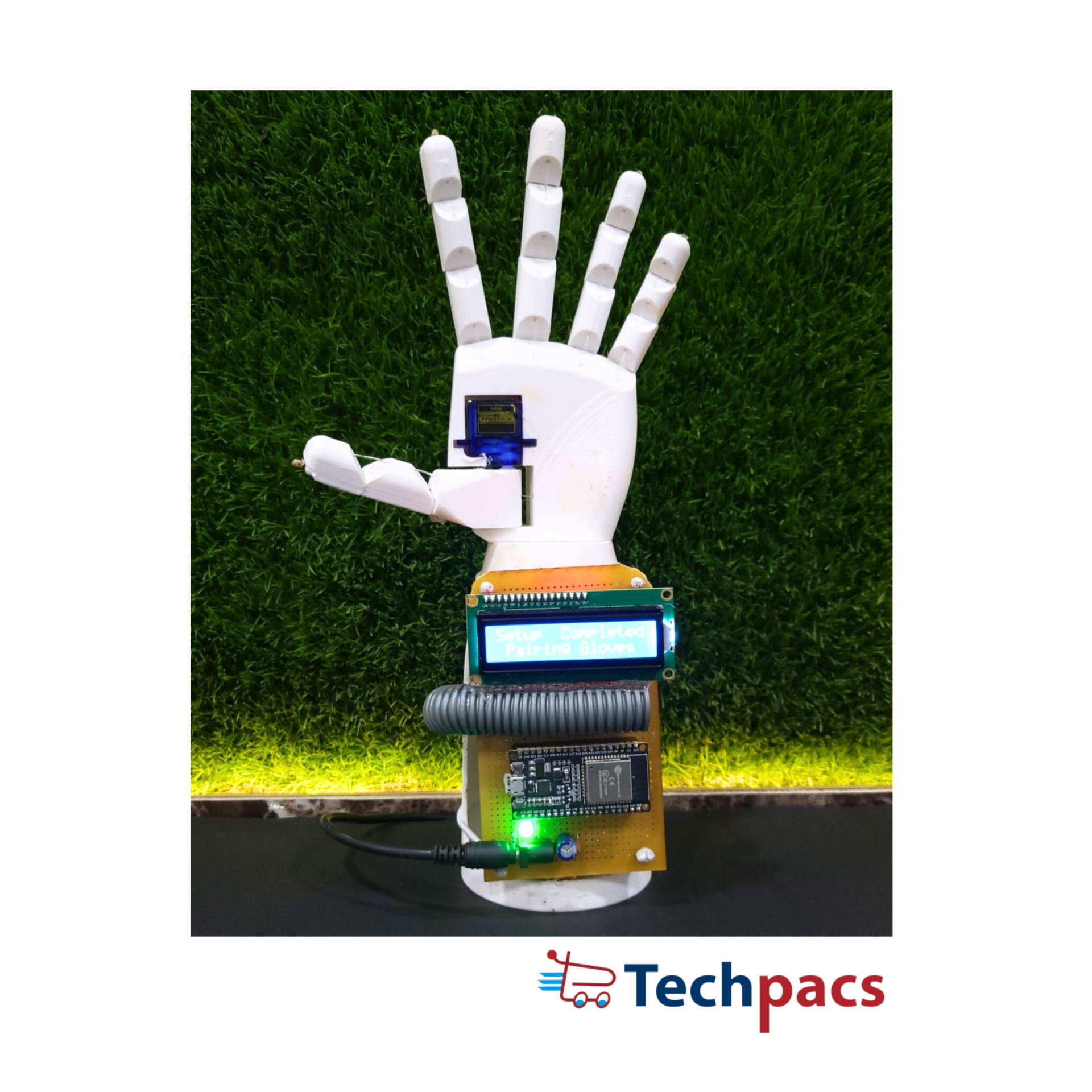
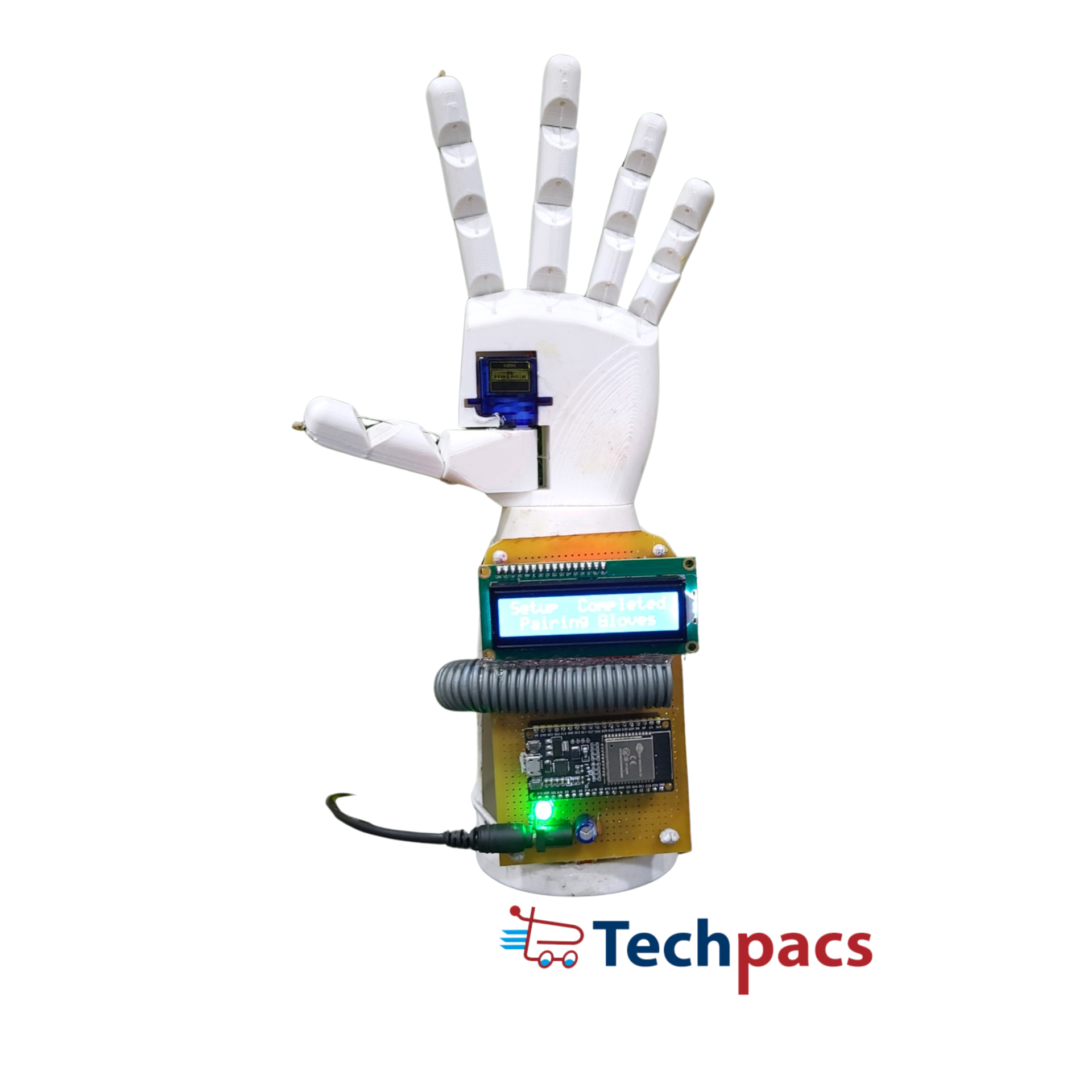
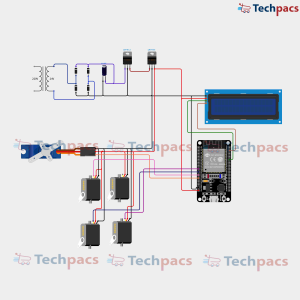
The ESP32-powered prosthetic hand circuit is designed to mimic the movements of a human hand. This ingenious circuit integrates the ESP32 microcontroller with multiple servo motors, a power supply unit, and an LCD display to provide real-time feedback and control. Let’s delve into the detailed working of each component and how they collectively enable the prosthetic hand to function seamlessly.
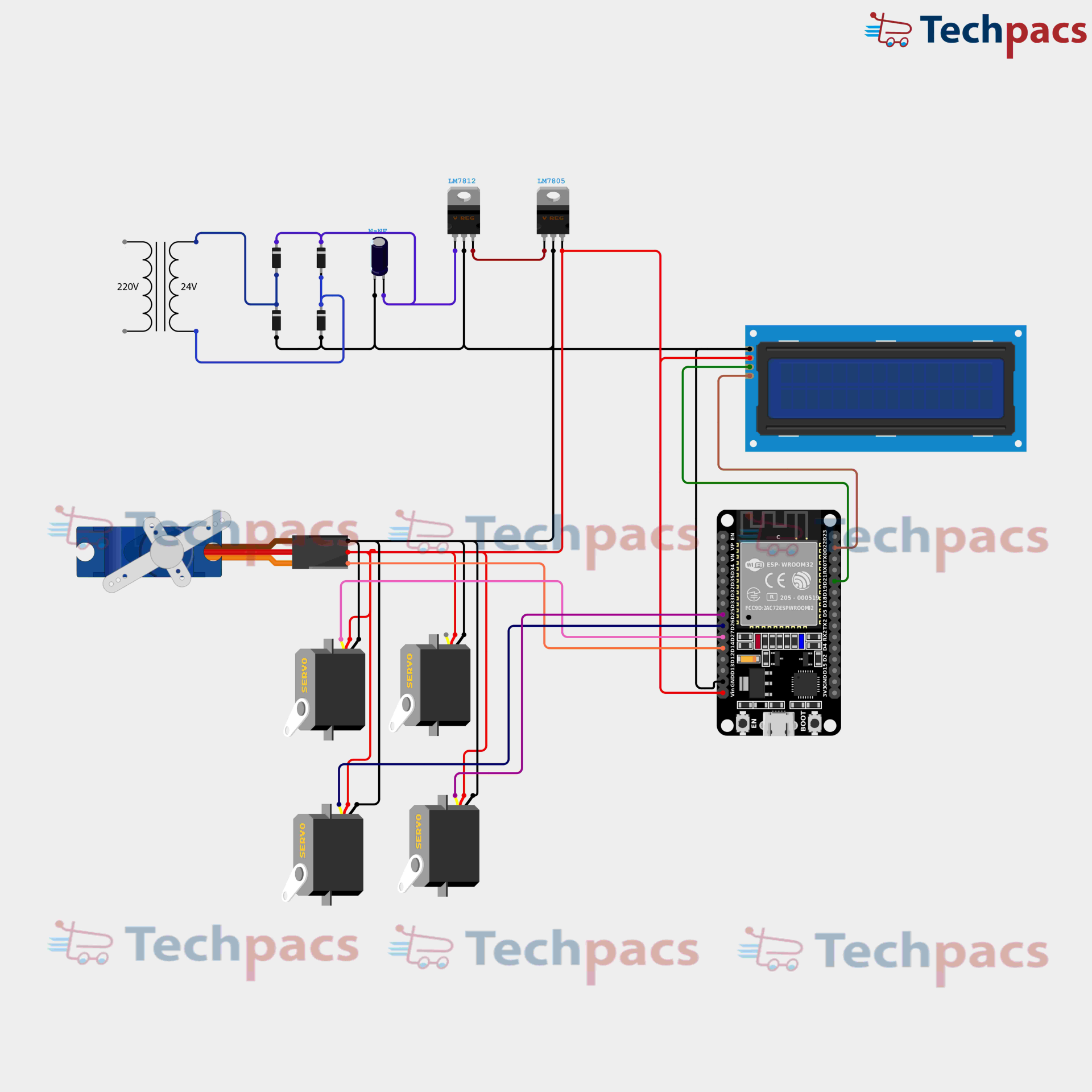
First and foremost, the power supply unit is critical to the operation of the entire system. The circuit diagram shows a transformer that converts a standard 220V AC to 24V AC. This 24V AC is then rectified and regulated through a series of steps involving diodes and capacitors, ultimately providing a smooth and stable DC voltage. The two LM7812 and LM7805 voltage regulators are crucial here, stepping down the voltage to 12V and 5V respectively, which are necessary for powering different components of the system.
The powerhouse of this project is the ESP32 microcontroller, which not only controls the servo motors but also interfaces with an LCD display for visual feedback. The ESP32 has Wi-Fi and Bluetooth capabilities, which can be harnessed for wirelessly controlling the prosthetic hand. The microcontroller communicates with servo motors connected to its PWM (Pulse Width Modulation) pins. Each servo motor is responsible for controlling the movement of different fingers of the prosthetic hand.
The servo motors are driven by precise PWM signals generated by the ESP32. Each servo motor has three connections – power (connected to 5V), ground, and the control signal from the ESP32. When the ESP32 sends a PWM signal to a servo motor, it dictates the angle to which the servo rotates. By coordinating these signals across multiple servos, the ESP32 can simulate realistic finger movements which mimic that of a human hand.
An important feature of this system is the integration of a 16x2 LCD display. The display is connected to the ESP32 through I2C communication. This is evident from the SDA and SCL lines in the circuit connecting the display to the ESP32. The display provides real-time feedback about the system status, such as the current angle positions of the servos or any error messages. It plays a vital role in debugging and ensures that the user has a transparent understanding of what the system is doing at any moment.
The overall synchronization of the prosthetic hand is efficiently managed by the ESP32’s software, coded to process input signals and generate corresponding output signals to the servos. This processing involves receiving data from sensors or user inputs, analyzing the required movements, and then controlling the servos accordingly. The Wi-Fi or Bluetooth capabilities of the ESP32 can also be utilized to send data to a remote server for monitoring or to receive commands wirelessly, adding a layer of modern connectivity to the prosthetic system.
In conclusion, the ESP32-powered prosthetic hand is a sophisticated blend of hardware and software, working in unison to achieve the seamless mimicking of human hand movements. From the precise control of multiple servo motors to the real-time feedback provided by the LCD display, each component plays a pivotal role in ensuring the functionality and reliability of the prosthetic hand. The robust power supply ensures constant operation, while the versatile ESP32 microcontroller acts as the brain, coordinating all movements and communications effectively.
Modules used to make ESP32-Powered Prosthetic Hand for Mimicking Human Hand Movements :
1. Power Supply Module
The Power Supply Module is critical for maintaining a consistent and reliable power source for the entire system. In this project, the power supply converts the alternating current (AC) from a 220V mains supply to a stable 24V direct current (DC). The AC is first stepped down by a transformer. After stepping down, the voltage is rectified and filtered to produce a smooth DC voltage. This module ensures that all electronic components, including the ESP32, servo motors, and display, receive a clean and stable supply of power, which is essential for their operation. It is connected to voltage regulators that further stabilize the voltage to the required levels for specific components.
2. ESP32 Control Module
The ESP32 Control Module serves as the brain of the prosthetic hand. The ESP32 is a powerful microcontroller with built-in Wi-Fi and Bluetooth capabilities. It is responsible for processing input signals and controlling the servo motors. Sensor data is received by the ESP32, which processes this information and sends appropriate signals to the servos. The ESP32 is programmed to interpret sensor data accurately and convert it into corresponding movements for the prosthetic hand. Overall, this module ensures the seamless integration and coordination of the input/output operations occurring within the project.
3. Sensor Interface Module
The Sensor Interface Module bridges the human hand movements to the ESP32. It typically includes sensors like flex sensors or IMU (Inertial Measurement Unit) sensors. These sensors detect the angle, speed, and position of the fingers in real-time. The data captured by the sensors are analog signals, which are sent to the ESP32. In the ESP32, these analog inputs are converted to digital signals for further processing. This module is pivotal for converting human hand movements into digital data that can be interpreted and acted upon by the microcontroller.
4. Servo Motor Control Module
The Servo Motor Control Module is tasked with actuating the prosthetic hand movements. This module receives pulse-width modulation (PWM) signals from the ESP32 and translates these signals into mechanical movement. The servos control the prosthetic fingers and thumb by adjusting the position based on the received PWM signals. Each servo acts as a joint and helps in mimicking the human hand’s motions. Proper calibration and control algorithms ensure smooth and precise movements, allowing the prosthetic hand to perform complex tasks.
5. Display Module
The Display Module provides real-time feedback and status information to the user. In this project, an LCD (Liquid Crystal Display) screen is used. It connects to the ESP32 and displays information such as sensor data, battery levels, and error messages. The display helps in debugging and monitoring the system’s performance during operation. As the prosthetic hand operates, the display can show essential metrics, aiding in real-time adjustments and ensuring the system behaves as expected.
Components Used in ESP32-Powered Prosthetic Hand for Mimicking Human Hand Movements :
Power Supply Section
Transformer
Steps down AC voltage to a lower AC voltage suitable for the circuit.
Rectifier Diodes
Converts AC voltage to pulsating DC voltage.
Capacitors
Smooths the DC voltage by filtering out the ripples from the rectifier.
Voltage Regulator ICs (LM7812 and LM7805)
Regulates the voltage to a constant 12V and 5V as required by various components in the circuit.
Control Section
ESP32 Microcontroller
Acts as the brain of the project, controlling the servos and managing input/output operations based on programmed instructions.
Servos (SG90)
Mechanical actuators responsible for creating the movements of the prosthetic hand by rotating to specific angles as controlled by the ESP32.
Display Section
LCD Display
Provides visual feedback or information about the operational status or sensor data for the user of the prosthetic hand.
Other Possible Projects Using this Project Kit:
1. Gesture-Controlled Robot Arm
Using the components in this kit, such as the ESP32 microcontroller, servo motors, and an LCD display, you can create a gesture-controlled robotic arm. By integrating a gesture sensor or using an accelerometer and gyroscope module, the arm can mimic the movements of a user's hand, allowing for intuitive control. This project could be particularly useful in fields like remote hazardous environment operations, where precise and human-like manipulation is required without direct human intervention.
2. Home Automation System
Leverage the ESP32's Wi-Fi capabilities to develop a home automation system. Utilize the servo motors to control window blinds, lights, and other appliances. The LCD display can provide real-time feedback and control options, while the ESP32 can be programmed to connect with a smartphone app or a web interface, allowing for remote control of household devices. This project aims to enhance convenience and can improve energy efficiency by automating tasks such as turning off lights when not in use.
3. Internet of Things (IoT) Weather Station
With the ESP32's connectivity and processing power, an IoT weather station can be built to monitor and report local weather conditions. Utilize sensors for temperature, humidity, and atmospheric pressure, and display the data on the LCD screen. The ESP32 can upload this data to an online server or app, providing real-time weather updates. This project is perfect for hobbyists and educational purposes, as it conveys how IoT systems collect and share environmental data.
4. Remote-Controlled Vehicle
Using the servo motors and ESP32 microcontroller, you can construct a remote-controlled vehicle that can be steered and controlled via a smartphone or a Bluetooth controller. The ESP32’s wireless capabilities facilitate remote communication and control. The inclusion of an LCD screen can provide real-time feedback on vehicle status, battery life, and environmental obstacles. This project combines mechanics and electronics for a fun and educational build that demonstrates basic principles of robotics and remote operation.
5. Smart Agriculture System
Utilize the ESP32 and servo motors along with additional sensors to create a smart agriculture system. The system can monitor soil moisture, temperature, and humidity, and automatically water plants as needed using the servo motors to control water valves. The LCD display can provide real-time data and control options, ensuring the crops receive optimal care without the need for constant human supervision. This project can contribute to more efficient and sustainable farming practices, making it ideal for both urban gardens and large-scale farms.
| Shipping Cost |
|
No reviews found!











































No comments found for this product. Be the first to comment!