



















ESP32-Powered Hungry Robot for Educational Robotics
The ESP32-Powered Hungry Robot project serves as an engaging and instructive platform for students and hobbyists to explore the fundamentals of robotics. Leveraging the versatile ESP32 microcontroller, this robot is designed to exhibit simple, interactive behaviors such as moving towards objects. This project combines elements of electronics, programming, and mechanical design to create an educational tool that can demonstrate basic principles of robotics, such as sensor integration and actuator control. By building this robot, users can gain hands-on experience with essential concepts in STEM (Science, Technology, Engineering, and Mathematics) education.
Objectives
- To provide a practical project for learning robotics and programming using the ESP32 microcontroller.
- To demonstrate how sensors and actuators can be integrated to create interactive robotic behaviors.
- To engage students in hands-on STEM activities that foster critical thinking and problem-solving skills.
- To encourage creativity by allowing users to customize and expand the robot's functionalities.
- To utilize affordable and accessible components for wide-reaching educational applications.
Key Features
- **ESP32 Microcontroller:** Utilizes the powerful and versatile ESP32 for wireless communication and control.
- **Infrared Sensor Integration:** Uses an infrared sensor for object detection and obstacle avoidance.
- **Servo Motor Control:** Employs a servo motor for precise movement and positioning.
- **Battery-Powered:** Operates on a rechargeable lithium-ion battery, enhancing portability.
- **Educational Focus:** Designed to be an approachable project for learning basic robotics and programming concepts.
- **Expansion Capabilities:** Offers flexibility for adding new features and sensors for more complex projects.
Application Areas
The ESP32-Powered Hungry Robot project finds application in a variety of educational contexts. In schools, it can be used within robotics clubs or as part of a STEM curriculum to provide students with hands-on learning experiences. Universities can incorporate the project into introductory robotics courses or workshops aimed at demonstrating practical electronics and programming skills. For hobbyists and makerspaces, the project serves as an ideal entry point into the world of DIY robotics. The modular nature of the design also allows for further experimentation and customization, making it a versatile tool for fostering innovation and creativity within the maker community.
Detailed Working of ESP32-Powered Hungry Robot for Educational Robotics :
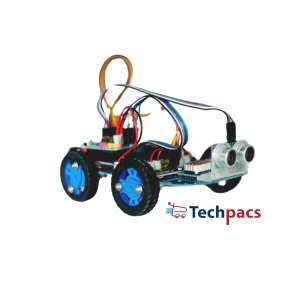
The ESP32-Powered Hungry Robot project is a fascinating endeavor designed for educational purposes, blending hardware and software elements to create an interactive robotic system. Central to this project is the ESP32 microcontroller module, which serves as the brain of the robot. The ESP32 microcontroller is renowned for its powerful processing capabilities and versatile connectivity options, making it an ideal choice for educational robotics projects.
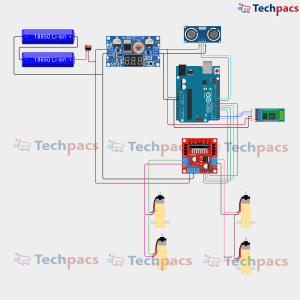
Starting from the power supply, the circuit utilizes a 3.7V Lithium-ion battery with an 850mAh capacity to power the entire system. This battery is connected to the VIN and GND pins of the ESP32, providing the necessary voltage for the microcontroller to function. The ground (GND) connection ensures a common reference voltage for all components in the circuit, facilitating seamless communication and functionality.
A crucial part of this project is the infrared (IR) sensor module connected to the ESP32. The IR sensor is equipped with an emitter and a receiver that work together to detect objects in front of the robot. The sensor module receives power from the ESP32's 3.3V pin and is grounded through the GND pin. The output of the IR sensor is connected to one of the general-purpose input/output (GPIO) pins on the ESP32, enabling the microcontroller to read the sensor data.
When an object is detected by the IR sensor, it sends a high signal to the connected GPIO pin on the ESP32. This signal is then processed by the microcontroller, triggering a predefined response, which in this case involves moving a servo motor. The servo motor is a small electromechanical device that can rotate to a specific angle based on the input signal it receives. The servo motor has three connections: power, ground, and signal. It is powered by connecting its VCC and GND pins to the 5V and GND pins of the ESP32, respectively, and the signal pin is connected to another GPIO pin of the ESP32.
Upon receiving the trigger signal from the IR sensor, the ESP32 processes it and sends a control signal to the servo motor through the connected GPIO pin. This control signal instructs the servo motor to rotate to a designated angle, simulating a "feeding" action by the robot. This movement is designed to mimic the motion of providing food, much like feeding a hungry pet. The precise control of the servo motor's position is achieved through pulse-width modulation (PWM), a technique commonly used to control the angle of rotation in servo motors.
Overall, the ESP32 microcontroller plays a pivotal role in this project by orchestrating the interactions between the various components. It reads sensor data from the IR sensor, processes this data in real-time, and generates appropriate control signals to drive the servo motor. This feedback loop enables the robot to interact with its environment in a responsive manner, demonstrating core principles of robotics such as sensing, processing, and actuation.
Additionally, the ESP32’s built-in wireless communication capabilities open the door for further enhancements, such as remote control via a smartphone app or integration with other smart devices. This scalability makes the ESP32-Powered Hungry Robot an excellent platform for educational purposes, providing students with hands-on experience in both hardware connections and software programming.
In conclusion, the ESP32-Powered Hungry Robot for Educational Robotics is a compelling project that merges hardware and software to create an interactive robot. The ESP32 microcontroller, with its versatile capabilities, serves as the cornerstone of this project, enabling the robot to sense its environment, process data, and actuate movements in a coordinated fashion. This project not only provides invaluable learning opportunities in robotics and programming but also sparks curiosity and inspires innovation in the realm of educational robotics.
Modules used to make ESP32-Powered Hungry Robot for Educational Robotics:
1. Power Supply Module
The power supply module for this project is facilitated by a Polymer Lithium Ion battery rated at 3.7V and 850mAh. This battery provides the necessary electrical energy to power all components of the circuit. The positive terminal of the battery is connected to the VIN pin of the ESP32, while the ground terminal is connected to the GND pin. This connection ensures that the ESP32 microcontroller is adequately powered. Additionally, the voltage supplied by the battery is within the safe operating range for the ESP32, ensuring stable operation. Ensuring a stable power supply is critical for the continuous and reliable function of the robot.
2. ESP32 Microcontroller Module
The ESP32 microcontroller acts as the brain of the project, interfacing with all peripheral components. It receives power from the connected battery, which allows it to execute its main functions. The microcontroller is responsible for executing the control logic, processing sensor inputs, and driving outputs to actuating devices. The ESP32 captures signals from the IR sensor and processes these signals to determine if an object (depicting food) is detected in front of the robot. After processing the sensor data, it decides whether to activate the servo motor to simulate the "hungry" behavior of the robot. Additionally, the ESP32 can be programmed and monitored via its USB interface.
3. Infrared (IR) Sensor Module
The infrared (IR) sensor module is connected to the ESP32 and serves to detect the presence of objects in front of the robot. It consists of an IR LED that emits infrared light and a photodiode that detects reflected IR light from objects. The IR sensor’s VCC and GND are connected to the 3.3V and GND pins of the ESP32 respectively, while the output pin of the sensor is connected to a GPIO pin of the ESP32. When an object is within the proximity range, the IR sensor will output a signal to the ESP32. The microcontroller then evaluates this signal to determine the appropriate action – in this case, whether to "eat" by activating the servo motor.
4. Servo Motor Module
The servo motor module creates the physical action that represents the robot's "eating" behavior. The servo motor receives control signals from the ESP32, where its control line is connected to a specific GPIO pin of the ESP32. The motor also requires power, so its VCC and GND lines are connected to the ESP32’s 3.3V and GND pins, respectively. Upon receiving a signal from the IR sensor indicating that an object is detected, the ESP32 sends a PWM signal to the servo motor to rotate it to a specific angle. This movement simulates the robot opening and closing its mouth, thereby interacting with the detected object. The precise control of the servo motor through the ESP32’s PWM ensures smooth and accurate motion every time an object is detected.
Components Used in ESP32-Powered Hungry Robot for Educational Robotics :
Power Supply Module
Polymer Lithium Ion Battery (3.7V, 850mAh): Provides the necessary power to the entire circuit and ensures the ESP32 and other components can operate independently without external power sources.
Microcontroller Unit
ESP32-WROOM-32: This is the main brain of the project, handling all processing tasks, executing the code, and managing communications with sensors and actuators.
Sensor Module
Infrared Obstacle Avoidance Sensor: Detects obstacles in front of the robot, allowing it to navigate its environment by sending signals to the ESP32, which then makes decisions based on these inputs.
Actuator Module
Servo Motor: This component is used to create movement in the robot, such as controlling its arms or other movable parts, based on commands received from the ESP32.
Other Possible Projects Using this Project Kit:
1. Smart Home Automation System
Using the ESP32 microcontroller, you can create a smart home automation system that allows users to control various home appliances remotely. By integrating Wi-Fi connectivity, the ESP32 module can communicate with a smartphone or a home Wi-Fi network. Connect sensors to monitor conditions such as temperature, humidity, or movement. This project can include functionalities like turning lights on/off, adjusting the thermostat, or triggering alarms based on sensor inputs, all controlled through a mobile app or voice commands. The addition of a servo motor can help in physically interacting with switches or dials in the home environment.
2. Internet of Things (IoT) Weather Station
Convert the ESP32 microcontroller into an IoT weather station to monitor and report weather conditions in real-time. Attach sensors such as temperature, humidity, and pressure sensors to gather data. This data can then be sent to a cloud-based platform using the ESP32's Wi-Fi capability for storage and analysis. Display the collected data on a mobile application or a web interface, making it accessible from anywhere. This project is beneficial for learning about IoT, data acquisition, and cloud computing, providing a practical application of these technologies in monitoring environmental conditions.
3. Automated Plant Watering System
Create an automated plant watering system using the ESP32 microcontroller to take care of your plants even when you are not around. Integrate a soil moisture sensor to determine the moisture level of the soil. When the soil moisture falls below a certain threshold, the ESP32 can activate a water pump controlled by a relay, watering the plants automatically. This project can also be extended to monitor and report the soil moisture level through a mobile app, giving users real-time updates and remote control over the watering process.
4. Remote-Controlled Car
Use the ESP32 to build a remote-controlled car that can be maneuvered using a smartphone over Wi-Fi. The ESP32 can control multiple servo motors to steer and drive the car, and other sensors can be added to avoid obstacles or follow predefined paths. By using a mobile app or a web interface, you can control the car's movement, making it a fun and interactive project. Additionally, a camera module can be added to the car to provide a live video feed, enhancing the remote control experience and providing a visual guide for navigation.
5. Smart Pet Feeder
Develop a smart pet feeder using the ESP32 microcontroller to automate the process of feeding your pets. Attach a servo motor to the dispenser mechanism that releases food at scheduled times or on-demand via a mobile application. Using the ESP32's internet connectivity, you can control the feeder remotely, ensuring your pet is fed on time even if you are not at home. Additional features can include monitoring the amount of food dispensed and alerting the user when the food supply is running low, creating a convenient and reliable feeding solution for pet owners.
| Shipping Cost |
|
No reviews found!








































No comments found for this product. Be the first to comment!