













ESP32-Powered Spider Robot for Robotics Learning
This project, titled "ESP32-Powered Spider Robot for Robotics Learning," is an educational venture aimed at introducing students and enthusiasts to the fascinating world of robotics. By leveraging the capabilities of the versatile ESP32 microcontroller, this spider robot offers a hands-on learning experience in electronics, programming, and mechanical design. The project entails designing and programming a six-legged robot that can autonomously navigate its environment, offering functionalities such as obstacle detection and avoidance. Through this project, users can gain valuable skills in the integration of hardware and software, opening doors to more advanced robotics concepts and applications.
Objectives
To develop a six-legged spider robot using the ESP32 microcontroller.
To program the robot for autonomous navigation, including obstacle detection and avoidance.
To provide a comprehensive learning experience in electronics, robotics, and programming.
To encourage experimentation and innovation in robotic design and functionality.
To demonstrate the practical applications of microcontrollers in robotics.
Key Features
1. Utilizes the powerful and versatile ESP32 microcontroller.
2. Integrates multiple servo motors for precise leg movements and walking patterns.
3. Equipped with ultrasonic sensors for obstacle detection and navigation.
4. Code is open-source, allowing for customization and further development.
5. Offers a modular design, making it easy to assemble and modify.
Application Areas
The ESP32-Powered Spider Robot serves as an excellent educational tool for robotics and STEM learning, making it ideal for use in schools, colleges, and maker spaces. It provides an engaging platform for students to explore robotics concepts in a hands-on manner. Additionally, hobbyists and robotics enthusiasts can utilize this project to enhance their understanding and skills in electronic design, programming, and mechanical engineering. Research laboratories can also adopt this project to experiment with autonomous systems and sensor integration, contributing to advancements in robotics and automation. Furthermore, the project can inspire innovations in small-scale robotic applications, including surveillance, environmental monitoring, and search and rescue missions.
Detailed Working of ESP32-Powered Spider Robot for Robotics Learning:
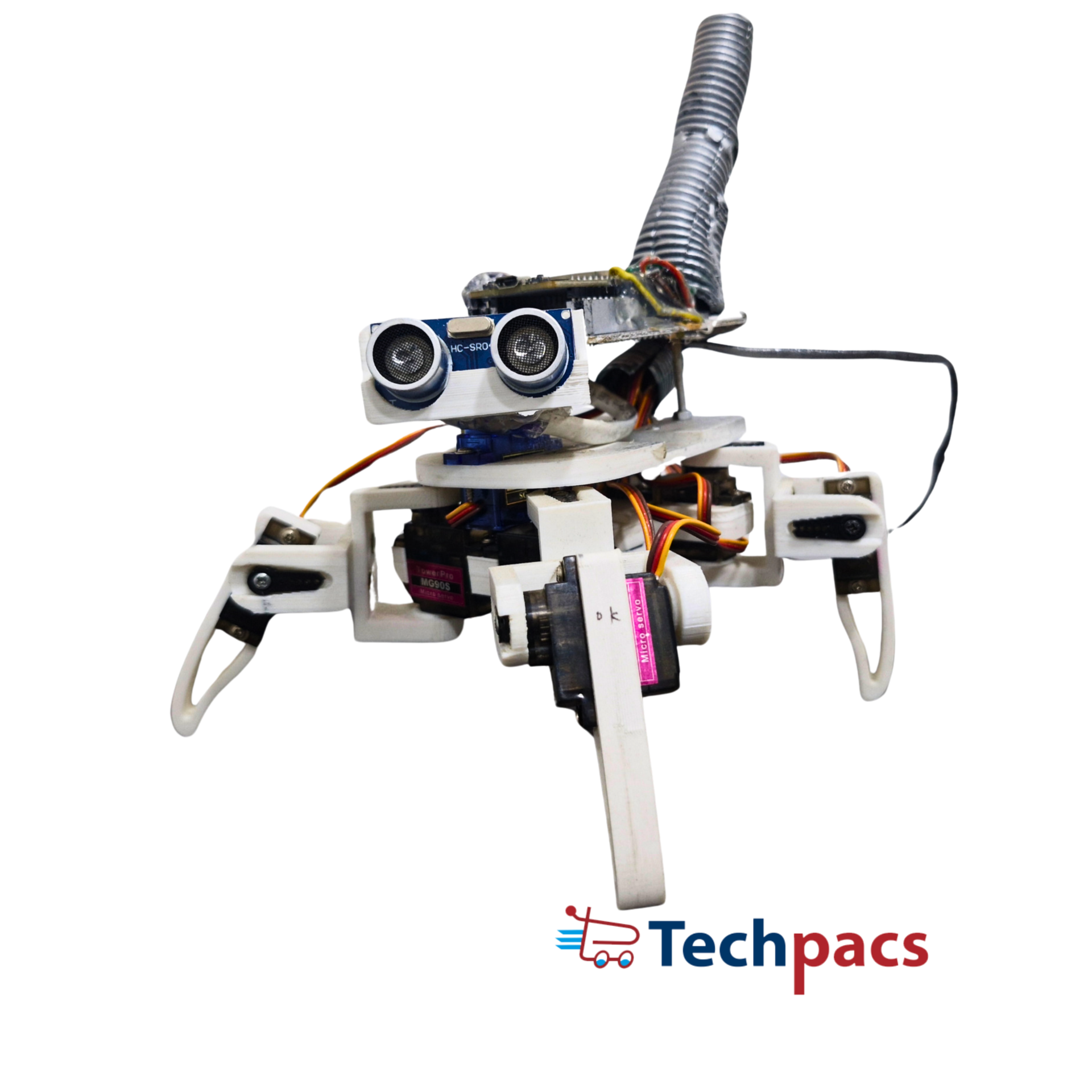
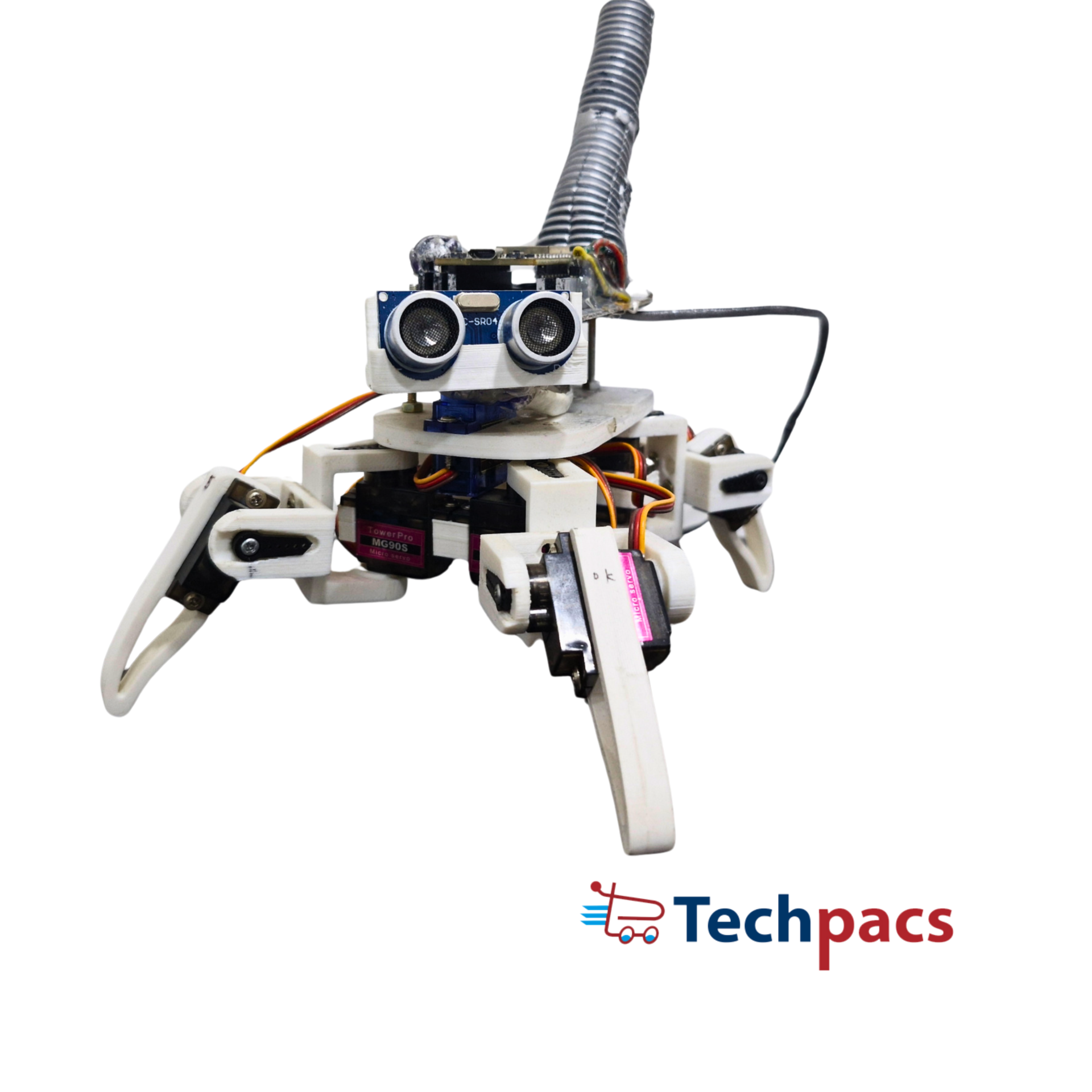
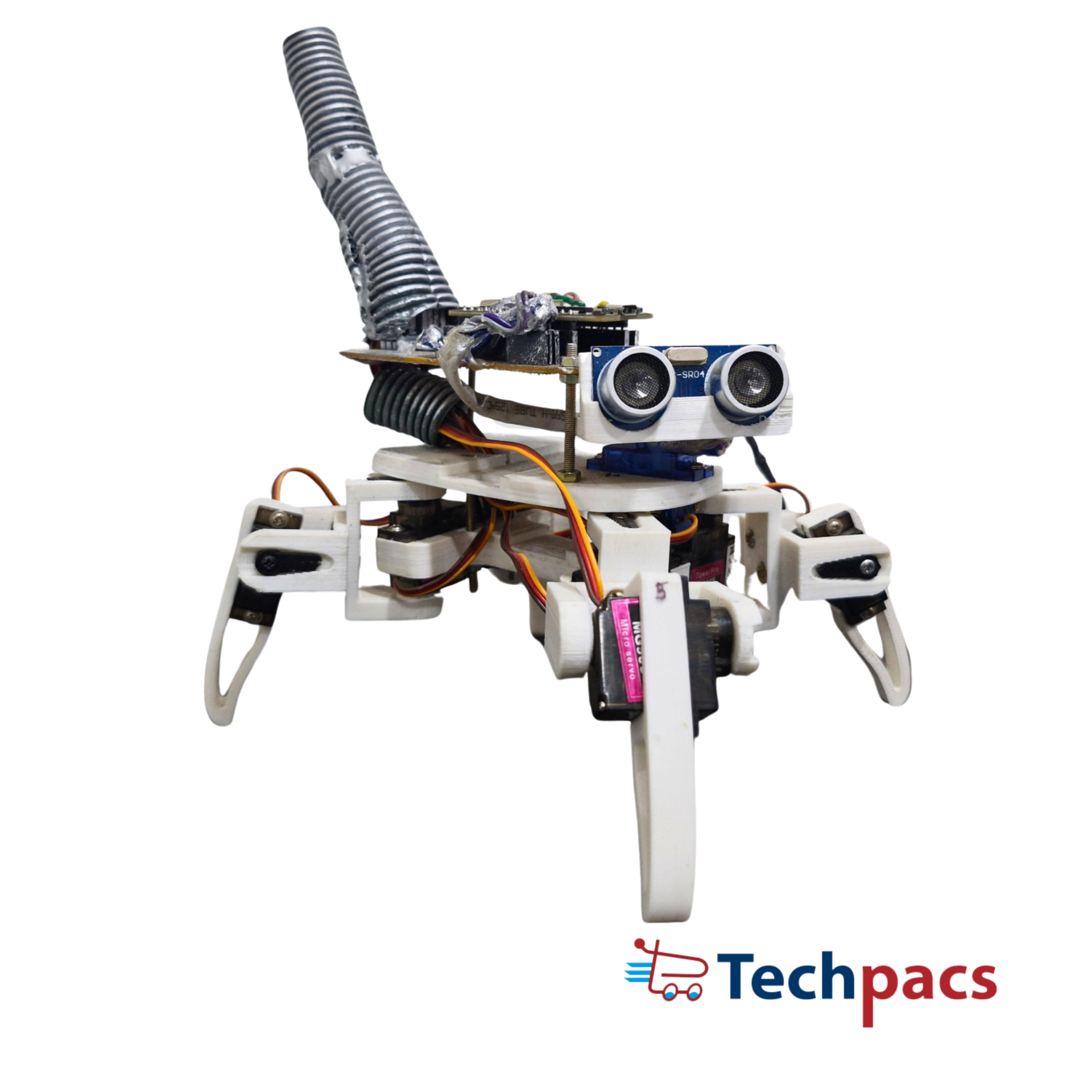
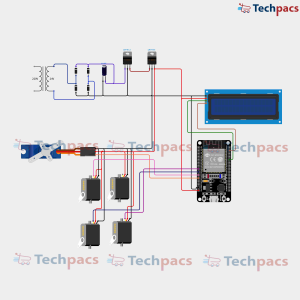
The ESP32-powered spider robot is an intricate yet fascinating assembly designed to provide an engaging robotics learning experience. At the core of this robot lies the powerful ESP32 microcontroller, renowned for its remarkable processing capabilities and Bluetooth/Wi-Fi connectivity. Encircling the ESP32 are numerous components that work in harmony to bring this spider robot to life, facilitating precise movements and environmental awareness.
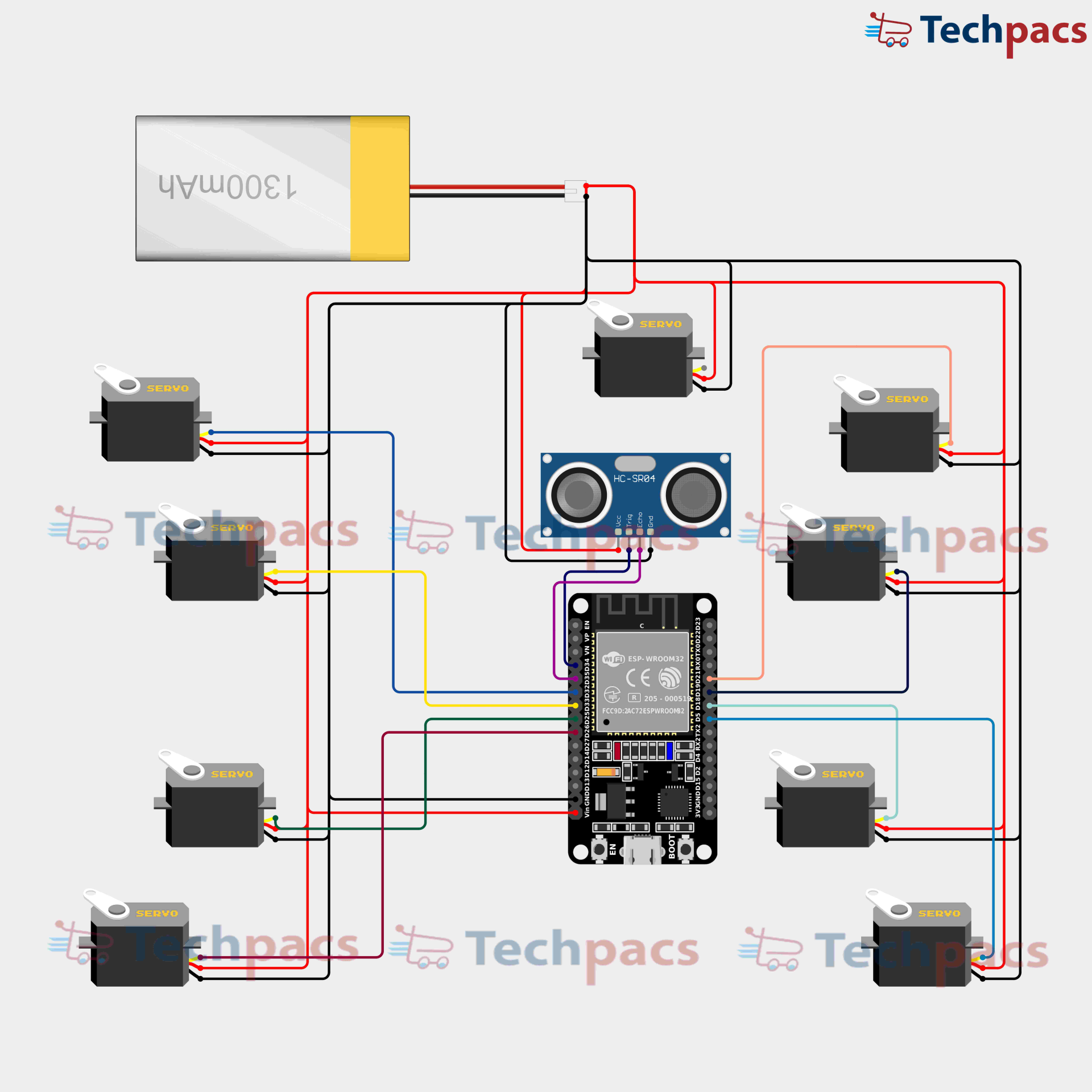
The ESP32 microcontroller is the brain of the spider robot. It orchestrates all operations by sending and receiving signals to and from various components. A rechargeable 1300mAh battery supplies power to the entire setup, ensuring all connected devices run smoothly without interruptions. The power from the battery is meticulously distributed to the servo motors and the ultrasonic sensor module through the ESP32.
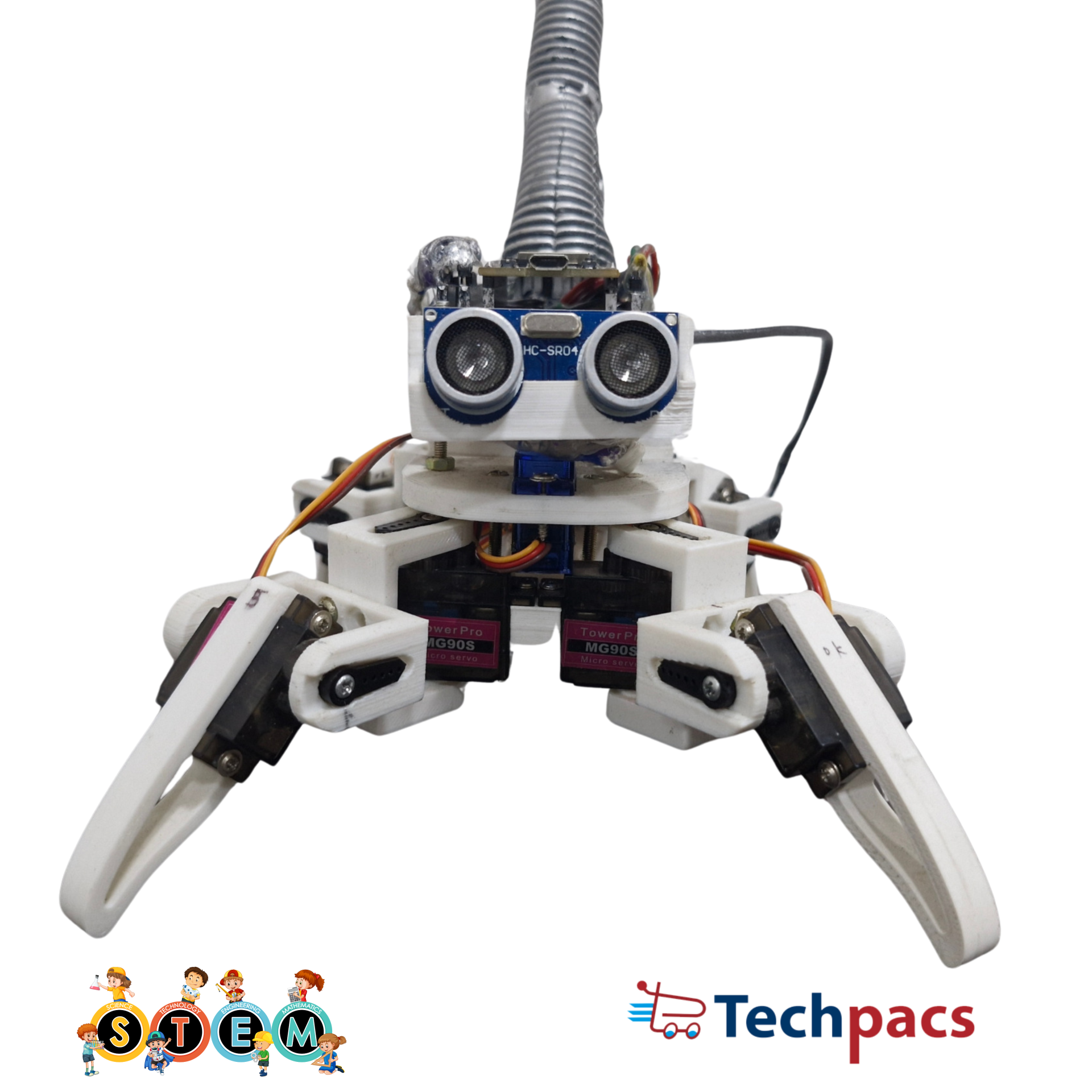
Eight servo motors are strategically positioned on either side of the ESP32, mimicking the legs of a spider. Each servo motor receives power and control signals from the ESP32 via dedicated wires. These control signals dictate the precise movements of the servos, allowing the spider robot to perform complex walking and turning motions. The servos convert electrical commands into mechanical movements, enabling the robot to traverse various terrains.
Crucial to the robot’s ability to navigate its environment is the HC-SR04 ultrasonic sensor module. Positioned at the front of the ESP32, this module actively monitors the surroundings by emitting ultrasonic sound waves and measuring the time it takes for the echoes to return. The sensor sends data regarding distances to nearby objects back to the ESP32, which then processes this information to make real-time decisions. These decisions often involve altering the robot's path to avoid obstacles, ensuring smooth navigation.
As the robot operates, sensory data flows seamlessly into the ESP32. This microcontroller is programmed to analyze the data, draw conclusions about the robot's current state, and issue commands to the servo motors accordingly. For instance, if the ultrasonic sensor detects an obstacle too close to the robot, the ESP32 will signal the relevant servos to change the position of the legs, steering the robot away from the threat. This process is continually repeated, enabling the robot to adjust dynamically as it moves.
Furthermore, the Wi-Fi and Bluetooth capabilities of the ESP32 enhance the robot’s interactivity. Users can connect to the robot via a smartphone or computer to send commands or update the robot’s firmware. This connectivity allows for remote control and monitoring, adding an exciting layer of interaction to the learning process. Real-time data transmission and command execution make the robot highly responsive and adaptable to user inputs.
Programming the ESP32 forms the essence of the robot's functionality. Utilizing environments such as the Arduino IDE or ESP-IDF, users can write code that governs the robot’s behaviors. The code dictates how the robot reacts to sensor data, how the servos move, and how the robot navigates its environment. This aspect of the project provides invaluable hands-on experience with coding, debugging, and iterative testing, which are all crucial skills in robotics and software development.
In summary, the ESP32-powered spider robot amalgamates sophisticated hardware components with advanced software programming to create an extraordinary learning tool. The ESP32 microcontroller serves as the central hub, managing power distribution and data flow. Servo motors and an ultrasonic sensor module animate the robot, giving it the ability to move like a spider and perceive its environment. The integration of Wi-Fi and Bluetooth connectivity facilitates remote interaction, while programming the ESP32 leads to a deeper understanding of robotics principles. This project kit embodies a comprehensive educational experience, blending theory with practical application in the realm of robotics.
Modules used to make ESP32-Powered Spider Robot for Robotics Learning :
1. Power Supply Module
The power supply module is a critical component of the ESP32-powered spider robot. This module typically includes a battery pack, in this case, a 1300mAh Li-ion battery, providing the necessary electrical power to all the components. The battery is connected in such a way that it can supply power to both the ESP32 microcontroller and the servo motors. The wiring from the battery connects to the power input pins of the ESP32 and distributes power through a common ground. Proper voltage regulation ensures that delicate electronic components like the ESP32 receive a stable power supply, avoiding potential damage from voltage spikes or drops. This module guarantees the spider robot has a consistent and reliable energy source during its operation.
2. ESP32 Microcontroller Module
The ESP32 microcontroller serves as the brain of the spider robot. It processes inputs from the sensors and sends control signals to the actuators, primarily the servo motors. The microcontroller is programmed to handle complex tasks such as walking gait algorithms and obstacle avoidance. The ESP32 connects to the ultrasonic sensor and multiple servo motors via its input/output (I/O) pins. Through its onboard Wi-Fi and Bluetooth capabilities, it can also be programmed remotely or controlled via a smartphone application. The ESP32 continuously collects data from the sensors, processes this information, and generates appropriate outputs to control the movement and behavior of the spider robot.
3. Ultrasonic Sensor Module
The ultrasonic sensor is used for detecting obstacles in the environment. It sends out ultrasonic waves and measures the time taken for the waves to bounce back from an object. This time data is used to compute the distance to the object. The sensor is connected to the ESP32 microcontroller, which reads the distance data via its I/O pins. The ESP32 processes this data and, based on the results, can decide to change the direction or gait of the robot to avoid a collision. This module enables the spider robot to navigate autonomously in its surroundings, adjusting its path as necessary to avoid obstacles.
4. Servo Motor Module
Servo motors are used to actuate the legs of the spider robot, allowing it to walk and maneuver. Each leg of the robot is typically controlled by two or more servo motors, providing multiple degrees of freedom for complex movement. The servo motors are connected to the ESP32 microcontroller, which sends pulses to control their position. By carefully timing these pulses, the microcontroller can precisely adjust the angle of each servo motor. The coordination of all the servo motors enables the spider robot to perform walking patterns and other movements necessary for navigating its environment. This module is essential for the mechanical functionality and mobility of the spider robot.
5. Control and Communication Module
The control and communication module encompasses methods for controlling the robot and exchanging data. Using the ESP32’s Wi-Fi and Bluetooth capabilities, the spider robot can receive commands from a remote control application or transmit telemetry data back to a user interface. This module allows for real-time adjustments and control, making the robot more interactive and easier to manage. The communication module also enables programming and debugging over a wireless network, allowing for easy updates and modifications to the robot’s programming without physical connection. This enhances flexibility and the ability to implement complex behaviors and interactions for the spider robot.
Components Used in ESP32-Powered Spider Robot for Robotics Learning :
Power Module
Battery: 1300mAh Li-Po Battery
Provides power to the entire circuit. It is connected to the ESP32 board and servo motors, ensuring the robot operates autonomously.
Control Module
ESP32 Board
Acts as the brain of the robot. It controls the servo motors and processes data from the sensors to navigate and perform tasks.
Actuation Module
Servo Motors x 8
These motors control the movement of the robot's legs, allowing it to walk and perform motions necessary for movement.
Sensing Module
HC-SR04 Ultrasonic Sensor
Used for obstacle detection. It helps the robot navigate by measuring the distance to objects in its path.
Other Possible Projects Using this Project Kit:
1. ESP32-Powered Biped Robot:
Utilize the same servo motors and ESP32 microcontroller from the spider robot project to build a biped robot. By reconfiguring the servos to mimic human leg movements, you can create a walking bipedal robot. This project will require programming the ESP32 to control the servos in a synchronized manner to achieve the walking motion, taking into account balance and coordination. An additional sensor like an MPU-6050 (accelerometer and gyroscope) could be added to improve balance control, making the robot more stable and adaptive to varying terrains.
2. Autonomous Obstacle-Avoiding Robot Car:
Using the ESP32, HC-SR04 ultrasonic sensor, and a set of DC motors instead of servos, create an autonomous car that can navigate around obstacles. The ultrasonic sensor will provide distance measurements to the ESP32, which will process the data and command the motors to steer the car around obstacles. This project will emphasize the use of sensor data for making real-time navigation decisions, teaching concepts of autonomous driving and sensor integration.
3. ESP32-Controlled Robotic Arm:
By reconfiguring the servos to create joints of a robotic arm, you can build a programmable robotic arm. The ESP32 will control the servos to perform precise movements, allowing the robotic arm to pick and place objects, draw, or perform assembly tasks. Adding a web server on the ESP32 will enable wireless control via a web interface, enhancing user interaction with the robotic arm and providing hands-on experience with IoT and robotics integration.
4. Voice-Controlled Home Automation System:
Leverage the ESP32's Wi-Fi capabilities to create a voice-controlled home automation system. Integrate the ESP32 with Google Assistant or Amazon Alexa to control household appliances such as lights, fans, and curtains using voice commands. By combining relays with the existing kit components, the ESP32 can receive commands via Wi-Fi and control electrical devices, making this project an excellent introduction to smart home technologies and IoT applications.
5. Interactive Light and Sound Show:
Create an interactive light and sound display using the ESP32, servos, and additional components like RGB LEDs and a speaker. Program the ESP32 to control the LEDs and servos in synchronization with music, creating a visual and auditory experience. This project will involve programming skills to synchronize multiple outputs and can be extended to include user interaction through a mobile app or physical buttons, providing a fun and engaging learning experience in electronics and programming.
| Shipping Cost |
|
No reviews found!










































No comments found for this product. Be the first to comment!