





Title: "HumanWalkBot: Revolutionizing Robotics Through Human-Inspired Locomotion"
Introduction
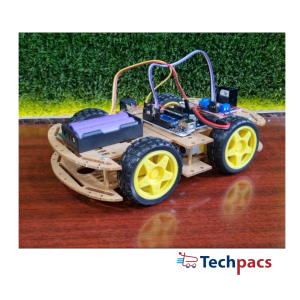
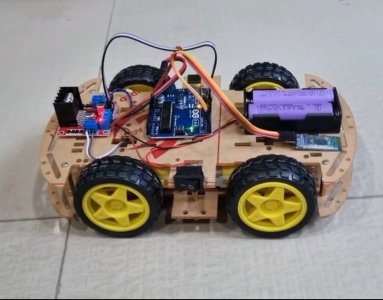
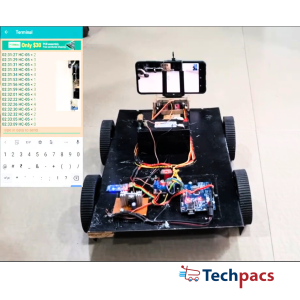
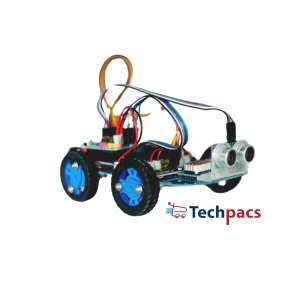
HumanWalkBot is a revolutionary project that delves into the realm of robotics with a singular focus on mimicking human walking behavior. By utilizing a combination of gear motors, connecting wires, switches, and batteries, this project aims to create a mechanical marvel that emulates the intricate movements of human locomotion.
In a world where wheeled robots dominate the landscape, HumanWalkBot dares to venture into uncharted territory by exploring the feasibility of legged locomotion. Inspired by the versatility and adaptability of animals and humans in traversing challenging terrain, the project seeks to bridge the gap between traditional wheeled robots and the untapped potential of walking machines.
The project's innovative design incorporates a unique switch pad that controls the robot's forward and backward movements, powered by a battery-operated gear motor.
Through meticulous engineering and precise synchronization, HumanWalkBot achieves a seamless, alternating leg movement that mirrors the fluidity of human walking, all while maintaining balance and stability.
Built on the foundations of mechanical and mechatronics engineering, HumanWalkBot pushes the boundaries of traditional robotics by introducing a new paradigm of mobility and dexterity. With a keen focus on replicating human-like motion patterns, this project represents a significant advancement in the field of robotics, showcasing the immense potential for future applications and advancements in legged robotic technology.
As a pioneer in the realm of legged robots, HumanWalkBot exemplifies the spirit of innovation and exploration, paving the way for a new era of robotic companions and assistants. By embracing the challenges of terrain traversal and mobility, this project opens up a world of possibilities for industries ranging from construction and exploration to healthcare and beyond.
With a meticulous attention to detail and a steadfast commitment to excellence, HumanWalkBot stands at the forefront of the robotics revolution, poised to redefine the boundaries of what is possible in the realm of robotic locomotion. Join us on this exciting journey as we showcase the potential of legged robots and the limitless possibilities they hold for the future.
Applications
The HumanWalkBot project's focus on developing a robot with human walking behavior has significant implications for various application areas. One immediate application could be in the field of search and rescue operations, where robots mimicking human locomotion could navigate through rough terrains and inaccessible areas more effectively than wheeled robots. Additionally, the project's innovative mechanical design could be utilized in the healthcare industry to create walking robots that assist in rehabilitation therapy for patients recovering from injuries or surgeries. The use of legged robots in window cleaning, as seen in some skyscrapers, could be expanded with the development of more advanced versions like the HumanWalkBot. Furthermore, the project's incorporation of gear motors, switches, and batteries could have applications in industrial automation, where robots with human-like walking capabilities could perform tasks that require intricate movements and balance.
Overall, the HumanWalkBot project has the potential to revolutionize robotics in various sectors, offering new possibilities for innovation and practical solutions to real-world challenges.
Customization Options for Industries
The HumanWalkBot project's unique features and modules can be adapted and customized for different industrial applications, particularly in sectors that require robots to navigate challenging terrains or mimic human movements. Industries such as search and rescue, delivery services, agriculture, and construction could benefit from this project's technology. For search and rescue operations in disaster-stricken areas, a legged robot like HumanWalkBot could maneuver through rubble and debris more effectively compared to wheeled robots. In agriculture, such robots could navigate uneven terrains and harvest crops with precision. In construction, they could assist in tasks that require climbing ladders or accessing hard-to-reach areas.
The project's scalability and adaptability make it suitable for a wide range of industrial needs, offering innovative solutions for complex challenges. By customizing the design and functionalities of HumanWalkBot, industries can enhance efficiency, safety, and productivity in various applications.
Customization Options for Academics
The HumanWalkBot project kit presents a unique opportunity for students to delve into the world of robotics and mechatronics. By utilizing modules such as Opto-Diac & Triac Based Power Switching and API and DLL, students can enhance their understanding of mechanical systems and control mechanisms. The project's focus on mimicking human walking behavior through innovative mechanical design opens up a wide range of educational possibilities. Students can explore concepts of balance, locomotion, and power systems while gaining hands-on experience in building and programming a robot. Additionally, the project's emphasis on replicating human motion can spark creativity and encourage students to experiment with different applications for legged robots.
Potential project ideas could include designing a robot for specific terrains or environments, investigating the limitations and advantages of legged locomotion, or even incorporating sensors for enhanced autonomy. Overall, the HumanWalkBot project kit offers a dynamic and engaging platform for students to develop valuable skills in engineering, design, and technology.
Summary
HumanWalkBot is a groundbreaking project focused on replicating human walking behavior through innovative robotics. By combining gear motors, switches, and batteries, this project creates a mechanical marvel that mimics human locomotion with precision. Addressing the limitations of wheeled robots, HumanWalkBot explores legged locomotion inspired by animals and humans. With a unique switch pad controlling movement, this project achieves fluid leg motions akin to human walking, showcasing advancements in robotics. With applications in assistive devices, entertainment, research, and more, HumanWalkBot opens doors to diverse industries, revolutionizing robotic companionship and mobility.
Join us in shaping the future of legged robotic technology.
Technology Domains
Mechanical & Mechatronics,Robotics
Technology Sub Domains
Core Mechanical & Fabrication based Projects,Mechatronics Based Projects,SemiAutonomous Robots,Swarm Robotics based Projects
Keywords
robotics, legged robots, walking machines, human walking behavior, gear motor, switches, batteries, mechanical design, balance, Opto-Diac, Triac Based Power Switching, API, DLL, mechatronics, mechanical engineering.
| Shipping Cost |
|
No reviews found!






































No comments found for this product. Be the first to comment!