













Robotic Arm for Industrial Automation and Training
The Robotic Arm for Industrial Automation and Training project is designed to enhance automation processes in industrial settings and provide practical training solutions for learners. This project leverages a sophisticated robotic arm, powered by a microcontroller, to execute precise and repeatable tasks. The aim is to bridge the gap between theoretical learning and practical application, enabling users to engage with advanced robotics technology. Equipped with a variety of features and capabilities, this robotic arm can perform complex tasks, ensuring accuracy and efficiency in industrial environments. It also serves as an educational tool to train individuals in robotics and automation concepts.
Objectives
To enhance automation processes in industrial settings by implementing a precise and dependable robotic arm.
To provide trainees with a hands-on learning experience in the field of robotics and automation.
To increase the efficiency and accuracy of repetitive tasks in manufacturing processes.
To demonstrate the integration of microcontroller systems with robotic hardware in an industrial context.
To provide a scalable and customizable solution for various industrial and educational applications.
Key Features
1. High precision and repeatability in performing industrial tasks.
2. Integration with a microcontroller for enhanced control and programmability.
3. User-friendly interface for easy operation and programming of the robotic arm.
4. Modular design allowing for scalability and customization as per specific needs.
5. Durable construction to withstand the rigors of industrial environments.
Application Areas
The Robotic Arm for Industrial Automation and Training has a wide range of applications in various industries and educational institutions. In manufacturing, the robotic arm can be programmed to perform repetitive tasks such as assembly, welding, material handling, and packaging with high precision and efficiency, thereby increasing productivity and reducing human error. In academic settings, the robotic arm serves as an invaluable tool for teaching and practical training in robotics, mechatronics, and automation courses, providing students with hands-on experience and enhancing their understanding of complex concepts. Additionally, it can be utilized in research and development projects to explore new technologies and methodologies in the field of robotics.
Detailed Working of Robotic Arm for Industrial Automation and Training :
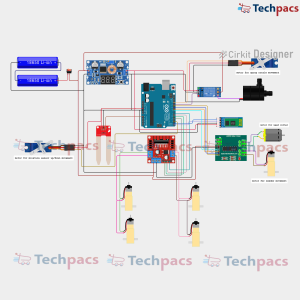
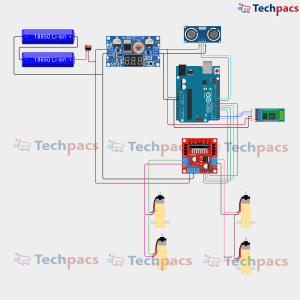
The robotic arm for industrial automation and training is a sophisticated assembly of electronic components designed to perform precise movements and tasks. The main controlling unit of this system is an ESP8266 microcontroller, which is connected to various peripherals to drive multiple servo motors. Each component in the circuit plays a critical role in ensuring smooth operation and accurate control.
Starting from the power supply section, a step-down transformer is used to reduce the mains supply voltage of 220V AC to 24V AC. This voltage is then rectified and filtered by a combination of diodes and capacitors to produce a stable DC voltage. The filtered voltage is further regulated to provide the necessary operating voltages for the circuit components, ensuring that the microcontroller and servo motors receive clean and consistent power.
The ESP8266 microcontroller is the heart of this robotic arm system. It processes input signals and generates the necessary control signals to drive the servo motors. Each servo motor is connected to the microcontroller via signal lines, which are configured to output Pulse Width Modulation (PWM) signals. These PWM signals determine the position of the servo motors by varying the duty cycle, thereby controlling the angular displacement of the robotic arm's joints.
To achieve precise movements, the ESP8266 microcontroller executes a predefined set of instructions or can be programmed dynamically through a user interface. Inputs can come from various sources such as sensors, external controllers, or software commands sent over Wi-Fi, leveraging the ESP8266's built-in wireless capabilities. The microcontroller interprets these inputs and adjusts the PWM signals accordingly, orchestrating a smooth and coordinated motion across all servos.
Each servo motor is responsible for moving a specific part of the robotic arm, such as the base rotation, shoulder, elbow, wrist pitch, wrist yaw, and the gripper. The combined movement of these motors allows the robotic arm to perform a wide range of tasks, from picking and placing objects to complex assembly operations. The accuracy and repeatability of these movements make the robotic arm an invaluable tool for industrial automation and training purposes.
In addition to its functional components, safety features are integrated into the circuit to protect the system from over-current and voltage spikes. Voltage regulators and protection diodes help in maintaining stable operation and prevent damage to the microcontroller and servos. This ensures longevity and reliability of the robotic arm in industrial environments where electrical disturbances can occur.
In conclusion, the robotic arm for industrial automation and training is a meticulously designed system that incorporates various electronic components to achieve precise and reliable control. From the initial power conditioning to the final actuation of servo motors, every element of the circuit contributes to the overall functionality and efficiency of the robotic arm. This makes it an essential tool for enhancing productivity in industrial settings and providing hands-on training in robotics and automation.
Modules used to make Robotic Arm for Industrial Automation and Training :
Power Supply Module
A stable power supply is essential for operating the robotic arm efficiently. The power supply module consists of a 220V AC to 24V DC transformer, which steps down the high voltage to a manageable level for the electronics. This 24V DC is then fed into a rectifier and filter circuit to convert the AC voltage to a smooth DC voltage. Two voltage regulators (LM7812 and LM7805) are used to further step down the voltage to 12V and 5V, respectively. The 12V is used to power the high-torque servo motors, while the 5V is fed to the microcontroller and other low-power electronic components. This configuration ensures that all parts of the robotic arm receive stable, regulated power for optimal performance.
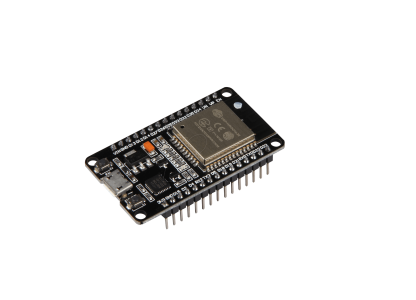
Microcontroller Module
The brain of the robotic arm is a microcontroller unit (MCU), which is crucial for processing inputs and controlling outputs. In this project, an ESP32 microcontroller is employed for its robust processing capabilities and built-in Wi-Fi/Bluetooth connectivity. The ESP32 receives input signals from various user interfaces or sensors and processes these signals according to the programmed instructions. The GPIO (General Purpose Input/Output) pins of the ESP32 are connected to the control lines of the servo motors. The microcontroller sends precise PWM (Pulse Width Modulation) signals to the servo motors, dictating the exact position and movement of the robotic arm. By programming the microcontroller, users can define the behavior and tasks of the robotic arm.
Servo Motor Module
Servo motors play a critical role in the robotic arm, providing the movement and precision needed for industrial tasks. This module consists of multiple high-torque servo motors, each responsible for a different joint or axis of the arm. The motors are connected to the microcontroller via their control pins, and they receive PWM signals that dictate their angle of rotation. These motors can rotate to a specified position and hold that position with a high degree of accuracy, making them ideal for precise manipulation tasks. The servo motors transform the electrical signals from the microcontroller into mechanical movement, enabling the robotic arm to perform complex tasks with precision.
Control Interface Module
The control interface module allows users to interact with the robotic arm. This module can include various types of input devices such as joysticks, buttons, or even wireless controllers. In the case of using an ESP32, Bluetooth or Wi-Fi can also be leveraged for wireless control, allowing more flexibility and ease of operation. The user inputs are captured and sent to the microcontroller, which then processes these commands and translates them into actions by sending appropriate signals to the servo motors. This interface is crucial for real-time control and programming of the robotic arm's movements and tasks in an industrial setting.
Feedback and Sensor Module
For enhanced precision and adaptability, the robotic arm is equipped with a feedback and sensor module. This module may include a variety of sensors such as position encoders, pressure sensors, and limit switches. These sensors provide real-time data about the position and status of the robotic arm and its components, which is fed back to the microcontroller. The microcontroller uses this data to make real-time adjustments to ensure precise and accurate operation. For example, position encoders can provide exact measurements of the motor shaft rotations, and limit switches can detect and prevent the arm from moving beyond its mechanical limits, preventing damage.
Components Used in Robotic Arm for Industrial Automation and Training:
Power Supply Section
Transformer
Converts high voltage AC from the mains to low voltage AC suitable for the robotic arm.
Bridge Rectifier
Converts AC (Alternating Current) to DC (Direct Current) which is needed for powering the DC components.
Capacitors
Smoothens the DC output from the rectifier to remove any ripples and provide a steady DC voltage.
Voltage Regulator Section
LM7812
Regulates the voltage to a constant 12V DC needed for specific components.
LM7805
Regulates the voltage to a constant 5V DC required by the microcontroller and other logic-level components.
Microcontroller Section
ESP8266 NodeMCU
Serves as the main control unit which processes the input signals and controls the robotic arm's movements.
Actuation Section
Servo Motors
Provides precise control of angular position, allowing the robotic arm to move accurately in different directions.
Other Possible Projects Using this Project Kit:
1. Automated Conveyor Belt System
An automated conveyor belt system can be constructed using the components of this project kit. By utilizing the servos to control the movement and direction of the belt, and the microcontroller (such as the ESP8266 or Arduino) to manage the control logic, you can automate the transportation process of goods in an industrial setting. Sensors can be integrated for object detection, ensuring precise control and efficiency in handling products. This system can be programmed to sort products into different categories, directing them to specific locations based on size, weight, or other attributes detected by sensors.
2. CNC Plotter
Another exciting project is developing a CNC plotter. This device uses the servos for precise positioning of a pen or other writing instrument over a surface, controlled by the microcontroller. By translating digital images or vector graphics into motor instructions, the CNC plotter can draw intricate designs on various materials. This project is excellent for learning about computer-aided design (CAD) and computer-aided manufacturing (CAM) principles. It can serve applications ranging from artistic endeavors to educational tools in mathematics and engineering.
3. Automated Painting Robot
Using the robotic arm and servo motors you can create an automated painting robot capable of painting surfaces uniformly. The robot can be programmed to follow specific paths and apply paint with consistent coverage and thickness. This project is particularly useful for industrial applications where automated painting can save time and reduce labor costs. It can also be adapted for creative arts, allowing for the automation of complex designs and patterns on various canvases.
4. Line Following Robot
A line-following robot is an intelligent system that uses sensor data to navigate a predefined path. Using the servos for movement and steering, and integrating sensors to detect line markings on the ground, the microcontroller can process input and adjust the servo movements accordingly. This project teaches the principles of autonomous robotics and real-time decision-making, with applications in automated guided vehicles (AGVs) used in warehousing and distribution centers for efficient material handling.
5. Smart Sorting Machine
A smart sorting machine uses the robotic arm to pick and place items into designated bins based on predefined criteria. This project can leverage computer vision techniques, using a camera to identify objects and the microcontroller to process the data and control the servos accordingly. This type of system is prevalent in recycling facilities, food processing plants, and any industry where sorting different classes of items can minimize human error and optimize efficiency.
| Shipping Cost |
|
No reviews found!









































No comments found for this product. Be the first to comment!