





Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation
The Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation is a cutting-edge project designed to explore autonomous navigation through complex environments. This project leverages the capabilities of Arduino microcontrollers, sensors, and motors to build a robot capable of identifying and following predetermined paths while intelligently avoiding obstacles. By integrating ultrasonic sensors and motor drivers, the robot can dynamically navigate its surroundings, making real-time decisions to alter its course. This ensures smooth and efficient movement without human intervention. Whether used in industrial automation, search and rescue operations, or educational purposes, this project demonstrates modern advancements in robotics and artificial intelligence.
Objectives
1. Develop a robot that can autonomously navigate and follow predefined paths.
2. Implement real-time obstacle detection and avoidance mechanisms using ultrasonic sensors.
3. Utilize Arduino microcontrollers to control and manage the robot's operations.
4. Design a robust system that integrates both hardware and software components effectively.
5. Evaluate the robot's performance in various environments to ensure reliability and efficiency.
Key Features
1. Autonomous pathfinding capability using predefined paths.
2. Obstacle detection and avoidance using ultrasonic sensors.
3. Arduino microcontroller-based control system.
4. Integration of motor drivers to control movement and direction.
5. Real-time decision-making capabilities for dynamic navigation.
Application Areas
The Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation has a wide range of applications across various fields. In industrial automation, it can streamline manufacturing processes by autonomously transporting materials and avoiding obstacles in busy factory environments. In the realm of search and rescue operations, the robot can navigate through challenging terrains to locate and reach individuals in need of assistance. Educational institutions can employ this robot to teach students about robotics, programming, and sensor integration, providing practical experience with advanced technology. Furthermore, the robot can be used in home automation systems, aiding in tasks such as home security and maintenance, showcasing its versatility and practical value.
Detailed Working of Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation :
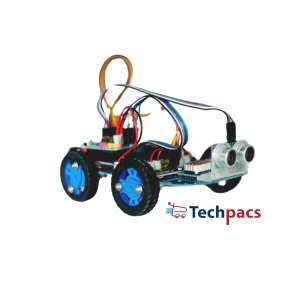
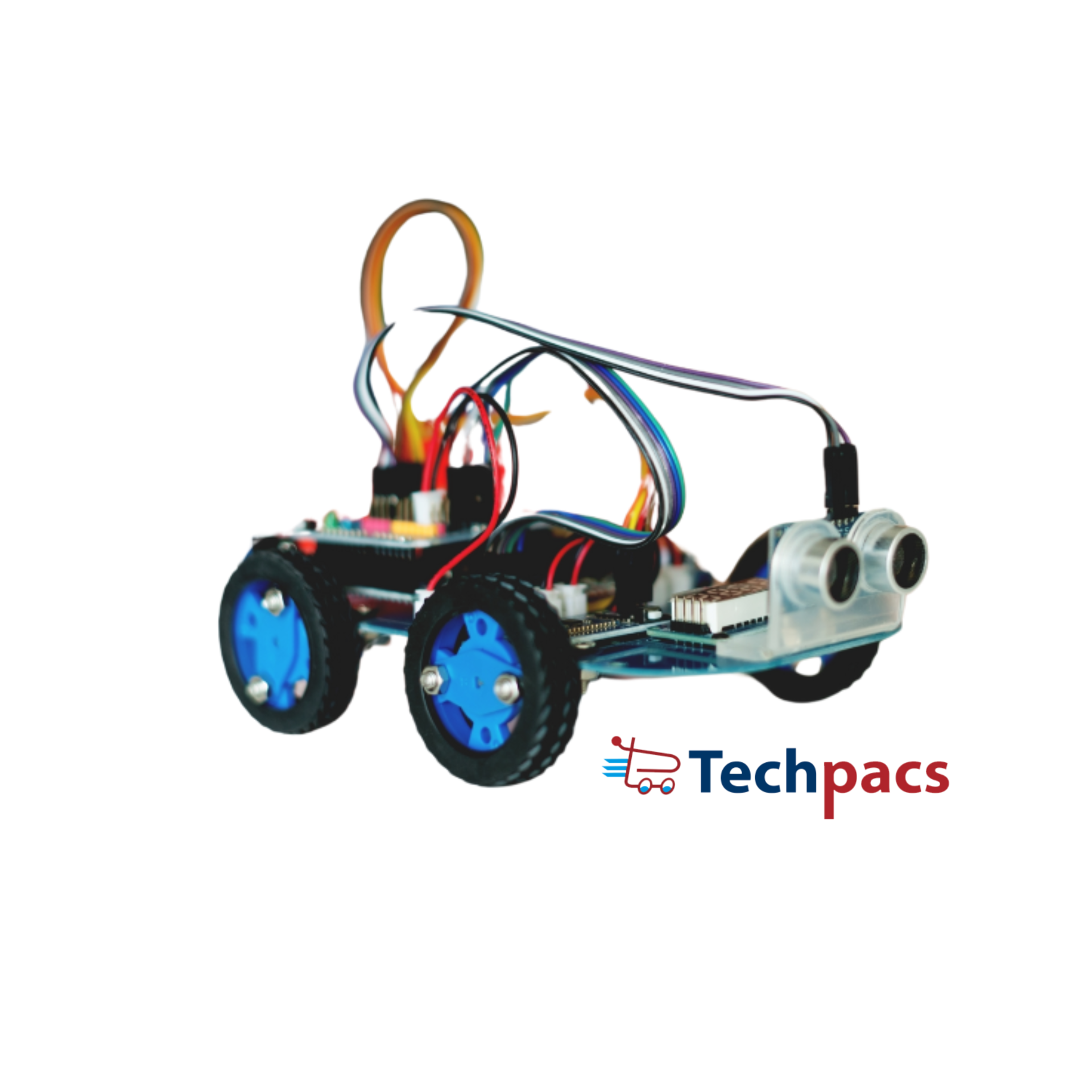
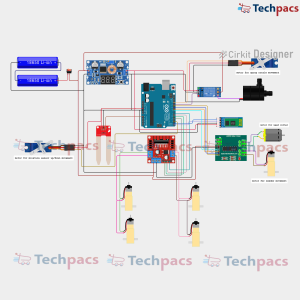
The Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation is an intriguing amalgamation of hardware and software elements, designed to navigate through paths while avoiding obstacles autonomously. At the heart of this system lies the Arduino Uno, which serves as the brain of the robot, meticulously controlling the entire operation based on the input it receives from various sensors and modules connected to it.
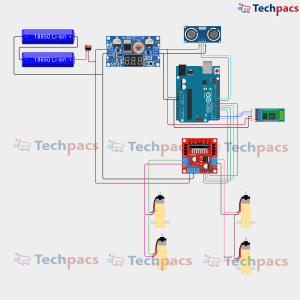
The robot is powered by two 18650 Li-ion batteries connected in series to ensure a steady power supply. To regulate this power and ensure that all components receive an adequate voltage, a voltage regulator module is utilized. The voltage regulator helps in stepping down the battery voltage to a suitable level for the Arduino and other peripherals, thereby safeguarding the components from potential damage due to over-voltage.
One of the critical inputs to the Arduino comes from the ultrasonic sensor, which is pivotal for obstacle detection. The ultrasonic sensor, mounted on the front of the robot, emits ultrasonic waves and measures the time taken for the echo to return. This time delay helps in calculating the distance from an obstacle. The sensor sends this data to the Arduino, which continuously monitors the distance readings to make real-time decisions.
Another essential component is the Bluetooth module, which allows for wireless communication. By integrating a Bluetooth module, the robot can be remotely controlled via a smartphone or other Bluetooth-enabled devices. This adds a layer of manual control, allowing the user to override the autonomous functionalities when needed. Commands sent from the smartphone are received by the Bluetooth module and then relayed to the Arduino for execution.
The movement of the robot is orchestrated by the L298N motor driver module, which controls the four DC motors attached to the robot’s wheels. The motor driver receives signals from the Arduino to control the speed and direction of the motors. Depending on the input from the ultrasonic sensor, the Arduino decides the movement commands – for instance, moving forward, turning left or right, or stopping to avoid a collision.
When the ultrasonic sensor detects an obstacle at a certain distance, the Arduino processes this data and determines the appropriate action. If an obstacle is detected too close, the Arduino sends a signal to the L298N motor driver to stop the motors or change direction to avoid the obstacle. This decision-making process takes place in real-time, ensuring the robot navigates smoothly and efficiently while avoiding obstacles in its path.
The Arduino reads inputs from the ultrasonic sensor continuously and processes the data against pre-defined threshold values to determine the presence of obstacles. Simultaneously, it interprets commands received through the Bluetooth module and adjusts the motor controls accordingly. This concurrent processing capability of the Arduino ensures seamless navigation and obstacle avoidance, making the robot adept at operating in dynamic environments.
In summary, the Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation is a sophisticated integration of ultrasonic sensors, motor drivers, Bluetooth communication, and a robust power supply, all orchestrated by the Arduino Uno. The continuous data flow from sensors to the Arduino, coupled with real-time processing and motor control, enables the robot to navigate autonomously and intelligently avoid obstacles, demonstrating a fascinating application of embedded systems and robotics.
Modules used to make Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation :
1. Power Supply Module
The power supply module is critical for providing power to the entire robot. In this project, two 18650 Li-ion batteries are used to supply the required voltage and current. The batteries are connected to a switch that controls the power flow. The output from the batteries is then regulated using a voltage regulator module to ensure that the voltage levels are suitable for the various components like the Arduino board, sensors, and motor drivers. Proper voltage regulation is crucial to avoid damaging sensitive electronic components while ensuring stable operation of the robot.
2. Arduino Uno Microcontroller Module
The Arduino Uno acts as the brain of the robot. It receives input data from the various sensors and processes this data to control the robot’s movements. The microcontroller is programmed using the Arduino IDE, and it interfaces with other components via digital and analog pins. The Arduino takes input from obstacle detection sensors and decision-making algorithms to navigate the environment and avoid obstacles. It sends signals to motor drivers to control the motors accordingly. The Arduino also communicates with the Bluetooth module to receive remote commands if needed.
3. Ultrasonic Sensor Module
The ultrasonic sensor is used for obstacle detection. It works by emitting ultrasonic waves and measuring the time it takes for the waves to bounce back from an object. This time is then converted into a distance measurement. The sensor is connected to the Arduino Uno, which processes the distance data to determine the presence of obstacles. The Arduino then makes decisions on how to navigate based on this data. For instance, if an obstacle is detected within a certain range, the Arduino may instruct the motors to stop or change direction.
4. Motor Driver Module (L298N)
The L298N motor driver module controls the speed and direction of the DC motors based on signals received from the Arduino. The module has H-bridge circuits that allow it to control the direction of current flow, enabling forward and reverse motion of the motors. The Arduino sends PWM (Pulse Width Modulation) signals to the motor driver to control the speed of the motors. The motor driver is essential for driving the high-current motors, as the Arduino itself cannot supply enough current. This module effectively acts as an intermediary between the Arduino and the motors.
5. DC Motors
DC motors are used to drive the robot’s wheels, allowing it to move. Each motor is connected to a wheel and controlled by the motor driver module. By varying the speed and direction of the motors, the robot can navigate its path and avoid obstacles. The motor driver receives control signals from the Arduino and adjusts the motor operation accordingly. The precise control of motor speed and direction is crucial for smooth navigation and accurate execution of commands issued by the Arduino, enabling the robot to follow the desired path and avoid collisions effectively.
6. Bluetooth Module (HC-05)
The Bluetooth module HC-05 is used for wireless communication, allowing remote control of the robot. The module communicates with the Arduino through serial communication (TX and RX pins). Commands sent from a Bluetooth-enabled device, like a smartphone, are received by the HC-05 module and transmitted to the Arduino. The Arduino processes these commands and controls the robot’s movements accordingly. This module adds flexibility in controlling the robot, making it easier to navigate in different environments or execute specific tasks remotely without direct human intervention, enhancing the robot's autonomous capabilities.
Components Used in Arduino-Based Path Finder and Obstacle Avoiding Robot for Navigation :
Power Supply Module:
18650 Li-ion Batteries: Provide the necessary power to the entire circuit, ensuring that all components receive the appropriate voltage.
Switch: Allows manual control to switch the power on and off to the entire robot circuitry.
Control Module:
Arduino Uno: Acts as the brain of the robot, processing inputs from sensors and sending control signals to the motors.
Sensor Module:
Ultrasonic Sensor: Measures distance to detect obstacles in the path of the robot, enabling obstacle avoidance.
Bluetooth Module: Allows wireless communication for controlling the robot or sending data to an external device.
Motor Driver Module:
L298N Motor Driver: Controls the speed and direction of the DC motors based on the signals received from the Arduino.
Actuator Module:
DC Motors: Drive the wheels of the robot, allowing it to move and navigate through different paths.
Other Possible Projects Using this Project Kit:
Line Following Robot
A line-following robot is designed to follow a predetermined path. This project uses the same Arduino board and motor driver (L298N) from the pathfinder and obstacle-avoiding robot project. Instead of the ultrasonic sensor, infrared (IR) sensors are used to detect the path, typically a black line on a white surface. The IR sensors' data helps the Arduino to control the motors, allowing the robot to follow the line accurately. This robot can be used in automated transportation systems in industries or for academic purposes to demonstrate basic robotics and sensor integration.
Bluetooth Controlled Car
By utilizing the Bluetooth module present in the kit, you can build a Bluetooth-controlled car. This project involves connecting a smartphone to the Arduino through the Bluetooth module to control the robot's movements. Mobile apps, such as Bluetooth terminal apps, can be used to send commands to the Arduino, which then processes these commands to drive the motors through the L298N motor driver. This project introduces wireless communication and remote control into your robotics projects, providing a comprehensive understanding of Bluetooth technology implementation.
Smart Home Automation
The Arduino and Bluetooth module can be used to create a home automation system. In this project, various home appliances can be connected to relays controlled by the Arduino. The Bluetooth module allows the user to send commands via a smartphone to switch on or off the appliances. This project teaches the principles of home automation and the integration of Bluetooth communication. With the addition of sensors, the system can be expanded to include automated environmental monitoring and control, such as temperature regulation and lighting control.
Temperature and Humidity Monitoring System
Using the Arduino, along with a DHT11 or DHT22 sensor, you can create a temperature and humidity monitoring system. The Arduino collects data from the sensor and displays it on an LCD or sends it to a smartphone via Bluetooth. This project provides insights into environmental monitoring and sensor data acquisition. Additional features, such as logging the data to an SD card or uploading it to an online server, can be added for more advanced applications. This system can be employed in domestic or industrial settings where environmental conditions need to be monitored and recorded.
Autonomous Delivery Robot
An autonomous delivery robot can be developed using the existing kit components. Incorporating GPS and additional ultrasonic sensors for precise maneuvering, the Arduino controller can navigate a defined route to deliver items within an environment. This project is beneficial for understanding the integration of navigation systems, motor control, and sensor fusion. It illustrates practical applications in modern logistics, showcasing concepts that are widely used in delivery and warehousing operations. The addition of machine learning can further enhance its capabilities, making it an advanced robotics project.
| Shipping Cost |
|
No reviews found!












































No comments found for this product. Be the first to comment!