









Voice-Controlled Humanoid Robot Using ESP32 for Interactive Learning
The project "Voice-Controlled Humanoid Robot Using ESP32 for Interactive Learning" focuses on developing a humanoid robot capable of responding to voice commands. By integrating the ESP32 microcontroller, which supports Bluetooth and Wi-Fi connectivity, this project aims to provide an immersive learning experience. The robot will be able to perform various tasks such as walking, talking, and interacting with users, making it an excellent tool for educational and hobbyist purposes.
Objectives
To create a humanoid robot that responds to voice commands.
To integrate ESP32 microcontroller for processing and connectivity.
To develop a user-friendly interface for voice control.
To enhance interactive learning by providing real-time feedback and interaction.
To facilitate the development of coding and electronics skills through hands-on practice.
Key Features
Voice-controlled operation using the ESP32 microcontroller.
Bluetooth and Wi-Fi connectivity for seamless communication.
Real-time interaction and feedback.
User-friendly programming interface suitable for beginners and enthusiasts.
Versatile applications in education, research, and hobby projects.
Application Areas
Voice-Controlled Humanoid Robots using ESP32 have diverse application areas, making them an invaluable resource for interactive learning and advanced robotics studies. In educational settings, these robots can be used to teach students about robotics programming, mechanics, and electronics hands-on. Research institutions can utilize them for developing and testing AI algorithms and voice recognition systems. Hobbyists and makers will find them an exciting project to enhance their technical skills and creativity. Additionally, voice-controlled humanoid robots have potential applications in customer service, assistive technology for individuals with disabilities, and as interactive companions in various environments.
Detailed Working of Voice-Controlled Humanoid Robot Using ESP32 for Interactive Learning
The voice-controlled humanoid robot, driven by an ESP32 microcontroller, is an interactive learning project designed to engage users by responding to voice commands. At the heart of the circuit is the ESP32 microcontroller, a powerful and versatile component known for its Bluetooth and WiFi capabilities. The entire system is powered by a series of four 18650 lithium-ion batteries connected in series to enhance voltage and provide adequate energy to run the system efficiently.
The pathway starts with the four 18650 lithium-ion batteries. These batteries are connected in series, and their combined output is routed through a main power switch. This switch serves as the primary control, enabling the user to turn the robot on and off. From there, power flows into a buck converter module, which is responsible for regulating and stepping down the voltage from the batteries to a suitable level for the ESP32 and other components to operate safely.
The configured buck converter then feeds the ESP32 with a stable voltage supply. The ESP32's main task is to act as the central processing unit of the robot. It receives voice commands via a connected microphone or Bluetooth module. The voice commands are processed by the ESP32's onboard computing resources and translated into corresponding motor commands. These processing capabilities harness both firmware embedded on the ESP32 and possibly cloud-based services for Natural Language Processing (NLP) if required.
Once the ESP32 interprets the voice commands, it sends corresponding signals to a motor driver module, specifically the L298N motor driver. The L298N is chosen for its ability to control two motors bi-directionally, which is crucial for the robot's movement. The ESP32 sends PWM (Pulse Width Modulation) signals to the motor driver module to precisely control the speed and direction of the motors. The L298N module amplifies these control signals to a level that can drive the motors, ensuring that the humanoid robot moves as intended.
Two DC motors, connected to the L298N motor driver, are responsible for the physical movement of the robot. These motors are typically connected to the robot's legs or wheels, translating the electrical signals into mechanical motion. Each motor's wiring is carefully connected to the output terminals of the L298N module, ensuring proper polarity and response to the control signals.
In this structured setup, every command issued verbally by the user is captured and processed in a sequential manner. Upon issuing a command, the voice input is captured by the microphone and transmitted to the ESP32. The ESP32 then processes this input, determines the necessary action, and subsequently issues control signals to the L298N motor driver. The motor driver transmits these control signals to the motors, resulting in accurate physical movements of the robot. This seamless integration of components ensures that the robot performs tasks as instructed, making it an effective interactive learning tool.
This intricate dance of electrical signals and mechanical actions showcases the elegance and complexity of modern robotics. The ESP32's ample processing power and connectivity options make it an ideal choice for such a versatile application. This entire configuration not only brings the humanoid robot to life but also offers a valuable learning platform for those interested in exploring the realms of robotics, electronics, and voice-controlled interfaces.
Modules used to make Voice-Controlled Humanoid Robot Using ESP32 for Interactive Learning :
1. Power Supply Module
The power supply module is crucial for ensuring the consistent functionality of the robot. In this design, 18650 Li-ion batteries are used as the primary power source. These batteries are connected in series to provide the required voltage and current. The power supply is managed through a DC-DC step-down (buck) converter, which regulates the voltage delivered to different parts of the circuit. The buck converter takes the higher voltage from the batteries and steps it down to a safer, lower voltage suitable for the ESP32 microcontroller and the motor driver. A switch is used to turn the power on and off, adding an additional layer of control and safety.
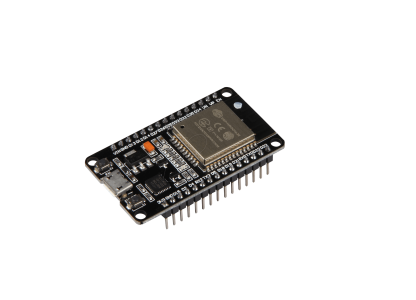
2. ESP32 Microcontroller Module
The ESP32 microcontroller serves as the brain of the humanoid robot. It is responsible for processing voice commands, controlling the motors, and communicating with any peripheral sensors or modules. This microcontroller receives power from the regulated output of the buck converter. Voice commands can be captured using a connected microphone module, which sends data to the ESP32 for processing. Once a voice command is recognized, the ESP32 processes the data, translates it into motor actions, and sends appropriate signals to the motor driver to perform the desired movements. The ESP32’s WiFi and Bluetooth capabilities can also be leveraged for remote control or further connectivity options.
3. Motor Driver Module
The motor driver module, represented here by the L298N driver, is responsible for controlling the motors based on commands from the ESP32. It receives low-power control signals from the ESP32 and uses them to drive the motors with higher currents. The motor driver interfaces with the ESP32 through GPIO pins, which send directional and PWM signals to control the speed and direction of the robot's movement. The L298N module is capable of driving two DC motors and can handle the power requirements efficiently, allowing the humanoid robot to move its limbs or wheels as necessary. By controlling the motors precisely, the robot can perform complex maneuvers and actions in response to voice commands.
4. DC Motors Module
DC motors are the actuators that perform physical tasks by converting electrical energy into mechanical movement. The motors are connected to the output terminals of the motor driver module. When the motor driver receives signals from the ESP32, it supplies the appropriate voltage and current to the motors to cause them to turn in the desired direction and at the specified speed. These motors can be used to drive the wheels of the robot, allowing it to move forward, backward, or turn. They can also be used in articulated limbs to create more sophisticated movements, enabling the humanoid robot to interact with its environment in a more lifelike manner.
Components Used in Voice-Controlled Humanoid Robot Using ESP32 for Interactive Learning :
Power Supply Module
18650 Li-ion Batteries: These provide the necessary energy to power the entire robot.
DC-DC Buck Converter: Used to regulate the voltage from the batteries to a stable voltage required by different modules.
Power Switch: This switch allows you to easily turn the robot on and off.
Control Unit
ESP32 Module: This microcontroller board is the brain of the robot, handling voice commands and controlling other components.
Motor Driver Module
L298N Motor Driver: This module is responsible for driving the motors based on the signals received from the ESP32.
Actuators
DC Motors: These motors move the robot's limbs or wheels under the control of the L298N motor driver and ESP32.
Other Possible Projects Using this Project Kit:
1. Voice-Controlled Home Automation System
Using the ESP32 module's voice recognition capability, a modern and efficient home automation system can be developed. Integrating this kit with relays and smart switches allows you to control household appliances such as lights, fans, and kitchen devices through voice commands. This project enables users to switch on/off and adjust the settings of these appliances without physical intervention, making it exceptionally convenient for elderly or physically challenged individuals. Furthermore, the system could be integrated with digital assistants like Google Assistant or Amazon Alexa, enabling a wide range of voice commands and internet-based controls, significantly enhancing the home automation experience.
2. Voice-Controlled Wheelchair
By leveraging the components of this project kit, you can develop a voice-controlled wheelchair designed to assist individuals with mobility challenges. The ESP32 module will interpret the user’s voice commands to control the movements of the wheelchair via the motor driver and motors. Users can command directions such as move forward, backward, turn left, and turn right. Safety measures such as obstacle detection sensors can be integrated to ensure safe navigation within various environments. This innovative project aims to provide enhanced independence and mobility to individuals who may find traditional manual wheelchairs difficult to use.
3. Voice-Controlled Robotic Arm
Another engaging project is creating a voice-controlled robotic arm using the ESP32 and motor driver components from the project kit. This robotic arm could be programmed to perform various tasks through voice commands, such as picking and placing objects, sorting items, or performing repetitive factory tasks. Integrating the system with additional sensors such as cameras and pressure sensors can allow users to perform more complex manipulations and operations. This project is ideal for educational purposes, as it can teach principles of robotics, automation, and voice interface technologies, providing a hands-on experience in these cutting-edge fields.
| Shipping Cost |
|
No reviews found!













































No comments found for this product. Be the first to comment!