











IoT-Based Otto Ninja Bot for Interactive and Fun Learning
The IoT-Based Otto Ninja Bot is a revolutionary project aimed at making learning interactive and fun for both children and adults. This bot leverages the power of IoT to provide engaging educational experiences. The Otto Ninja Bot is equipped with several servos, sensors, and a Wi-Fi enabled microcontroller to bring a new dimension to learning environments. Its programmable nature allows for customization and scalability, making it a versatile tool for classrooms, homes, and educational institutions.
Objectives
1. To create an interactive learning companion that enhances educational experiences through IoT technology.
2. To integrate programmable functionalities that can be tailored to various educational needs and curriculums.
3. To make learning enjoyable and engaging for children using robotics and interactive technologies.
4. To promote STEM education by providing a hands-on learning tool that interacts with students.
5. To facilitate remote learning by enabling interactions through IoT connectivity.
Key Features
1. Programmable using popular coding languages like Python and Blockly.
2. Equipped with multiple servos and ultrasonic sensors for interactive behaviors.
3. Wi-Fi enabled, allowing for remote control and updates.
4. Modular design, making it easy to add new features and sensors.
5. Battery-operated for portability and ease of use in various environments.
Application Areas
The IoT-Based Otto Ninja Bot is ideal for a wide range of educational settings. In classrooms, it can be used to demonstrate basic principles of robotics and coding, engaging students in an interactive manner. At home, it serves as an educational toy that fosters curiosity and learning in a fun way. Libraries and community centers can use it for workshops and events to promote STEM education. Additionally, it is a valuable tool for special education, providing a unique way to interact with students with different learning needs. The Bot's ability to connect to the internet opens up possibilities for remote education and online interactive lessons, broadening the scope of learning beyond physical classrooms.
Detailed Working of IoT-Based Otto Ninja Bot for Interactive and Fun Learning :
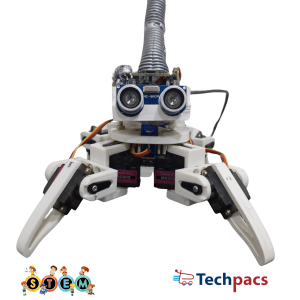
The IoT-based Otto Ninja Bot is an innovative and engaging project designed for fun and interactive learning, particularly for those interested in robotics and Internet of Things (IoT) technologies. This project incorporates an ESP-WROOM-32 microcontroller for managing the bot’s functions and an array of components that contribute to its interactive and autonomous abilities. Let's delve into how this circuit works and the flow of data within the system.
The heart of the Otto Ninja Bot system is the ESP-WROOM-32 microcontroller. This powerful module controls all the bot’s sensors and actuators. It receives power from a 1300mAh lithium polymer (LiPo) battery, which supplies the necessary voltage and current for all components. Power distribution is key to the effective operation of the bot. The battery's positive terminal connects to the VIN pin of the microcontroller, delivering power to it, while the ground (negative) terminal establishes a common reference point for all the electronic components.
Key interfacing components include the HC-SR04 ultrasonic distance sensor and six servo motors, which play a crucial role in the bot’s movement and interaction with its surroundings. The HC-SR04 ultrasonic sensor operates by emitting ultrasonic waves through its transmitter and listens for the reflected waves through its receiver. The duration of the echo received back helps in calculating the distance to an object. The sensor's VCC and GND pins are connected to the microcontroller’s 5V and GND pins respectively, while the Trig and Echo pins are wired to specific GPIO pins for signal transmission and reception.
The ESP-WROOM-32 microcontroller processes the distance data input from the ultrasonic sensor, utilizing it to make real-time decisions for the bot's movements. These decisions are then translated into commands that actuate the servo motors. Each of the six servo motors is connected to the microcontroller’s PWM-capable GPIO pins. The servos are distributed with three on each side of the bot, providing forward, backward, and pivot movements.
Detailed functioning of the servo motor connections can be outlined as follows. Each servo motor has three connections: VCC, GND, and Signal. The VCC and GND of the motors are wired to the microcontroller’s 5V and GND pins, respectively, ensuring consistent power delivery. The Signal pins of the servos are connected to the respective PWM GPIO pins on the microcontroller. These PWM signals control the position and movement of the servo motors, thus maneuvering the bot based on the processed sensor data.
The data flow in this system is both systematic and dynamic. Initially, the ESP-WROOM-32 initializes the required peripherals and sensor by issuing a set of commands. Once powered, the ultrasonic sensor starts detecting objects and sending the distance information to the microcontroller. Based on this real-time data, complex algorithms determine the bot’s next move, which is then converted into PWM signals to control the servos. The servo motors execute these movement commands, ensuring that the bot interacts with its environment efficiently and precisely.
The interaction between the ESP-WROOM-32 microcontroller, HC-SR04 ultrasonic sensor, and the servo motors exemplifies an exemplary use of IoT for educational purposes. By learning how each component works and how data flow is managed in this project, students and enthusiasts can gain hands-on experience in robotics and IoT systems. This project not only provides a solid foundation in circuit building and coding but also sparks creativity and deeper interest in the fields of technology and engineering.
In summary, the Otto Ninja Bot, with its intricate yet intuitive design, operates through a harmonious interplay of power supply, sensor data processing, and actuator control. This perfectly encapsulates the essence of modern robotics and IoT, making it an excellent educational tool that is both interactive and fun. It stands as a testament to the power of integrating various technological components into a cohesive learning platform.
Modules used to make IoT-Based Otto Ninja Bot for Interactive and Fun Learning :
Power Supply Module
The power supply module is fundamental for powering all the electronic components in the Otto Ninja Bot. The circuit diagram shows a 1300mAh battery connected to the rest of the system. This battery provides the necessary power to the ESP-WROOM-32 microcontroller and the connected components such as the servo motors and ultrasonic sensor. The positive terminal of the battery is connected to the VCC (3.3V) pin of the ESP-WROOM-32 and other VCC pins of different components, while the negative terminal is connected to the GND pin. Proper power regulation ensures that the robot operates efficiently without overheating or encountering voltage drops, maintaining stable and consistent functionality throughout its operation.
Microcontroller Module
The central control unit of the Otto Ninja Bot is the ESP-WROOM-32 microcontroller module. This module acts as the brain of the bot, processing inputs and controlling outputs. The ESP-WROOM-32 receives power from the battery and interfaces with all the other components. It executes pre-programmed instructions which determine the robot's behavior. The GPIO pins on the ESP-WROOM-32 are used to control the servo motors and read the ultrasonic sensor inputs. Through programmed logic, the microcontroller processes signals from the ultrasonic sensor to detect obstacles and commands the servo motors to act accordingly, generating movements that make the learning experience interactive and engaging.
Ultrasonic Sensor Module
The ultrasonic sensor module used here is the HC-SR04, and it plays a crucial role in the interactive aspect of the Otto Ninja Bot. The sensor emits ultrasonic waves and measures the time it takes for the echo to return. This data is sent to the ESP-WROOM-32, which calculates distances to nearby obstacles based on the echo time. The sensor has four pins: VCC, GND, Trigger, and Echo. The Trigger pin receives a signal from the ESP-WROOM-32 to emit an ultrasonic pulse, and the Echo pin sends a signal back to the ESP-WROOM-32 when the echo is received. This information allows the microcontroller to determine the distance of objects in the robot's vicinity, enabling the bot to respond interactively to its environment, such as stopping or changing direction upon detecting an obstacle.
Servo Motors Module
The Otto Ninja Bot includes multiple servo motors that are responsible for its movements. In the circuit diagram, six servo motors are connected to the ESP-WROOM-32 microcontroller. Each servo motor has three wires: VCC, GND, and Signal. The VCC and GND wires are connected to the power supply, while the Signal wires are connected to the GPIO pins on the ESP-WROOM-32. The microcontroller sends PWM (Pulse Width Modulation) signals to the servos, controlling their positions. These motors drive the various movements of the bot, such as walking, dancing, or making gestures. By adjusting the duty cycle of the PWM signal, the microcontroller can precisely control the angle of each servo, creating smooth and coordinated movements that are both entertaining and educational for students learning about robotics and automation.
Components Used in IoT-Based Otto Ninja Bot for Interactive and Fun Learning :
Microcontroller Module
ESP-WROOM-32 - This is the brain of the Otto Ninja Bot. It is responsible for executing the code and controlling the entire operation of the bot, including signals to sensors and actuators.
Power Supply Module
1300mAh Battery - Provides the necessary electrical energy to power the ESP-WROOM-32 microcontroller and other components of the Otto Ninja Bot.
Actuators
6 x Servo Motors - These motors are used to provide movement to different parts of the bot, enabling it to perform various actions and gestures. Each servo motor adjusts the position of a specific part of the bot based on signals from the microcontroller.
Sensors
HC-SR04 Ultrasonic Sensor - Measures the distance to objects in front of the bot. It helps in detecting obstacles and enables the bot to interact with its surroundings.
Other Possible Projects Using this Project Kit:
1. Smart Home Automation System
Using the components in the Otto Ninja Bot project kit, you can create a Smart Home Automation System. By integrating the ESP-WROOM-32 microcontroller with various sensors and actuators, you can control home appliances like lights, fans, and security systems remotely. The microcontroller’s Wi-Fi capabilities allow it to connect to the internet, enabling real-time monitoring and control via a smartphone or web application. Servo motors can control window blinds, while the ultrasonic sensor can detect motion and trigger alarms. This project not only enhances home security but also contributes to energy efficiency by managing electrical devices based on occupancy and usage patterns.
2. Obstacle-Avoiding Robot
An obstacle-avoiding robot can be created using the ESP-WROOM-32 microcontroller and the ultrasonic sensor from the Otto Ninja Bot kit. By programming the microcontroller to process input from the ultrasonic sensor, the robot can detect and navigate around obstacles in its path. The servo motors will act as the robot’s joints, enabling it to move forward, backward, and turn in various directions. This project is an excellent introduction to robotics and sensor integration, demonstrating basic principles of autonomous navigation and real-time processing.
3. Voice-Controlled Robot
With the inclusion of a voice recognition module, the project kit can be used to build a voice-controlled robot. By connecting the ESP-WROOM-32 microcontroller to the voice module and integrating it with the servo motors, you can create a robot that responds to voice commands. For instance, users can instruct the robot to move in specific directions, perform tasks, or even express emotions through predefined movements. This project is an engaging way to showcase the interaction between voice recognition technology and robotics, making it a perfect educational tool for learning about advanced communication interfaces.
4. Remote-Controlled Robotic Arm
The components from the Otto Ninja Bot kit can be repurposed to create a remote-controlled robotic arm. Utilizing the ESP-WROOM-32 microcontroller for connectivity and servo motors for articulation, this project involves building a robotic arm that can be controlled remotely using a smartphone or computer. The robotic arm can mimic human hand movements, making it useful for tasks that require precision and repeatability, such as picking and placing objects, or even simple writing and drawing tasks. This project combines aspects of mechanical design and IoT, providing practical insights into automation and remote operations.
| Shipping Cost |
|
No reviews found!







































No comments found for this product. Be the first to comment!