












DIY Mars Rover with Multiple Sensors and Wireless Camera for Exploration
This DIY project involves building a Mars Rover equipped with multiple sensors and a wireless camera for exploration. The project aims to create a small-scale, functional replica of a Mars Rover that can navigate various terrains, gather environmental data, and provide visual feedback through a wireless camera. Utilizing components such as a microcontroller, motor drivers, sensors, and a wireless camera module, this project is designed to offer a hands-on experience in robotics, electronics, and programming. The project highlights several practical applications in STEM education, hobbyist robotics, and remote sensing technology.
Objectives
- To design and build a functional Mars Rover model for educational and exploration purposes.
- To integrate various sensors for environmental data collection such as temperature, humidity, and distance.
- To install a wireless camera to provide real-time visual feedback and remote control capabilities.
- To enhance programming skills through developing control algorithms for the rover's navigation and data acquisition systems.
- To promote interest in robotics and space exploration through an engaging, hands-on project.
Key Features
- **Multi-Sensor Integration:** Includes sensors for temperature, humidity, and distance to mimic real rover functionalities.
- **Wireless Camera:** Enables real-time video streaming and remote control capabilities over a wireless network.
- **Efficient Motor System:** Utilizes motor drivers and multiple motors for smooth navigation and mobility across various terrains.
- **Autonomous Navigation:** Programmed to navigate autonomously based on sensor data, enhancing skills in automation and AI.
- **Customizable and Expandable:** Designed to allow modifications and additions of extra components and features for advanced projects.
Application Areas
The DIY Mars Rover project has numerous applications in both educational and practical fields. In educational institutions, it serves as a hands-on learning tool for students to understand robotics, programming, and sensor integration. The project promotes STEM (Science, Technology, Engineering, and Mathematics) education by providing practical experience with these disciplines. Hobbyists and robotics enthusiasts can use the Mars Rover project to explore and experiment with different sensors, control algorithms, and wireless communication technologies. Additionally, the autonomous navigation and data collection features of the rover can be applied in real-world remote sensing and data acquisition scenarios, such as environmental monitoring and exploration of hazardous or inaccessible areas.
Detailed Working of DIY Mars Rover with Multiple Sensors and Wireless Camera for Exploration :
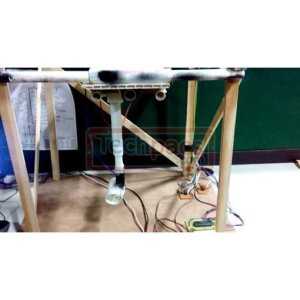
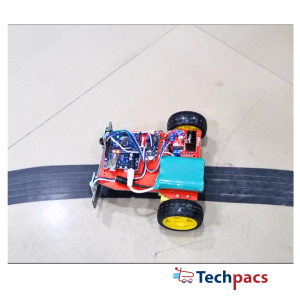
The DIY Mars Rover is a sophisticated piece of technology designed for exploration, featuring multiple sensors and a wireless camera. The heart of this rover is an ESP32 microcontroller which facilitates the integration and functioning of all the connected components. The power source is a 1300mAh battery, ensuring that the rover can operate independently for extended periods.
Upon powering the circuit, the ESP32 initializes and begins executing the programmed instructions. It connects to various components including four DC motors connected through an L298N motor driver module. The L298N is essential for controlling the rover's movement, receiving signals from the ESP32 to adjust speed and direction. Each pair of motors is connected to a side of the rover, enabling precise movement and turning capabilities. Signals from the ESP32 dictate the rotation and speed, allowing the rover to navigate complex paths.
In terms of sensory input, the rover is equipped with a range of sensors. One of the key sensors is the Ultrasonic Sensor (HC-SR04), which is used for obstacle detection. This sensor continuously emits ultrasonic waves and measures the time it takes for the echo to return after hitting an obstacle. The distance is calculated and sent back to the ESP32, which then processes this data to avoid collisions by adjusting the movement of the motor driver accordingly.
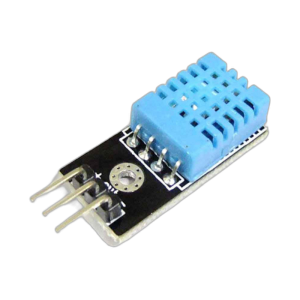
Another significant sensor in this setup is the DHT11 sensor, which monitors environmental conditions such as temperature and humidity. This sensor regularly sends data to the ESP32, which can use this information for various purposes, including environmental monitoring and decision-making algorithms to choose optimal paths or monitor the rover's operational environment.
A wireless camera is also integrated into the system, providing real-time visual data. The camera is connected via Wi-Fi to the ESP32, which streams the captured footage to a remote console or device used by the operator. This functionality is crucial for remote navigation and for recording visual information about the rover’s surroundings.
Moreover, there is a buzzer connected to the ESP32. The buzzer can be used for audible alerts whenever certain conditions are met, such as proximity to an obstacle detected by the ultrasonic sensor or specific environmental conditions detected by the DHT11 sensor. The buzzer provides audio feedback enhancing the operator's ability to make timely decisions.
The central ESP32 microcontroller serves as the brain of this intricate system, coordinating all input and output actions. It processes data from the sensors, responds to remote commands, controls the motors through the L298N motor driver, and streams video from the wireless camera. The integration and seamless function of all these components enable the DIY Mars Rover to be a versatile and adaptable exploration tool.
In conclusion, the DIY Mars Rover is a comprehensive project that combines multiple sensors and a wireless camera to create a powerful exploration device. The ESP32 microcontroller ensures that all components work together, providing mobility, environmental monitoring, obstacle detection, and real-time visual feedback. This holistic system enables detailed exploration and data collection, making it a valuable project for enthusiasts and researchers interested in autonomous rover technology.
Modules used to make DIY Mars Rover with Multiple Sensors and Wireless Camera for Exploration :
1. Power Supply Module
The power supply module comprises a 1300mAh Li-Po battery that provides the necessary energy to power all the components of the rover. It is crucial for the stability and operation of the entire system. The battery is connected to the motor driver and ESP32 microcontroller to supply consistent voltage. Proper power management ensures that the sensors, microcontroller, and motors receive adequate power to function optimally, preventing any power drops or spikes that could potentially damage the components or cause the rover to malfunction during exploration.
2. Microcontroller Module
The ESP32 microcontroller serves as the brain of the Mars Rover. It interfaces with all other modules, gathers data from sensors, and controls the motors. The ESP32 is known for its powerful Wi-Fi and Bluetooth capabilities, enabling remote control and data transmission. It receives environmental data from the sensors and processes this information to make decisions. For instance, the ESP32 might use sensor data to navigate obstacles or to adjust speed and direction. Additionally, it handles commands received from the remote-control interface, ensuring the rover follows user instructions accurately.
3. Motor Control Module
The motor control module consists of an L298N motor driver, which is responsible for driving the six DC motors mounted on the rover's wheels. These motors control the movement and steering of the rover. The ESP32 microcontroller sends PWM signals to the motor driver, which then adjusts the voltage and polarity supplied to the motors to control their speed and direction. This allows the rover to move forward, backward, and turn left or right. The motor driver ensures efficient power distribution to the motors, enabling smooth and precise movements essential for navigating the Martian-like terrain.
4. Sensor Module
The sensor module includes various sensors like the DHT11 for temperature and humidity, and the ultrasonic sensor (HC-SR04) for obstacle detection. These sensors provide critical environmental data to the ESP32 microcontroller. The DHT11 sensor measures the temperature and humidity levels, helping the rover to monitor its environment, while the ultrasonic sensor sends out ultrasonic waves and measures the time taken for the echoes to return. This data is then used to calculate the distance from obstacles, allowing the rover to avoid collisions. The collected data is essential for decision-making processes in exploring unknown terrains.
5. Wireless Camera Module
The wireless camera module captures live video and transmits it back to the user. This module is crucial for remote exploration as it allows the user to visually inspect the terrain and navigate the rover accordingly. The camera is connected to the ESP32 microcontroller, which processes the video feed and transmits it via its Wi-Fi capabilities to a remote device. The live feed can be monitored on a smartphone or a computer, providing real-time insights into the rover's surroundings, making it easier to control and explore distant environments effectively.
Components Used in DIY Mars Rover with Multiple Sensors and Wireless Camera for Exploration :
Microcontroller Module
ESP32
The ESP32 microcontroller manages sensor data processing and communication. It provides the computing power to interface with different modules and handle tasks.
Power Module
1300mAh Li-Po Battery
This battery provides the necessary power to run the microcontroller, sensors, and motors. It ensures a stable and continuous power supply during rover operation.
Motor Driver Module
L298N Motor Driver
The L298N motor driver controls the direction and speed of the rover's motors. It allows the microcontroller to manage motor operations effectively.
Motor Module
DC Motors
DC motors provide the necessary mechanical movement for the rover. They are connected to the wheels and are controlled by the motor driver for navigation.
Sensor Modules
Ultrasonic Sensor
The ultrasonic sensor measures distance to obstacles for navigation and collision avoidance. It sends data back to the ESP32 for processing.
DHT11 Sensor
The DHT11 sensor monitors the environmental temperature and humidity. It provides key data for environmental analysis on Mars-like terrains.
Miscellaneous
Buzzer
The buzzer generates sound signals for alerts and notifications. It can be programmed to indicate various states of the rover.
Other Possible Projects Using this Project Kit:
Autonomous Obstacle Avoidance Robot
Using the project kit designed for the DIY Mars Rover, you can develop an Autonomous Obstacle Avoidance Robot. This robot can navigate its environment independently, using sensors to detect and avoid obstacles. By integrating ultrasonic or infrared sensors, the rover can judge distances and alter its path to avoid collisions. This project is ideal for learning about autonomous navigation, sensor integration, and real-time decision-making. It finds applications in automated delivery systems and smart vehicle prototypes.
Smart Home Surveillance Robot
Transform your Mars Rover kit into a Smart Home Surveillance Robot. By integrating a wireless camera, movement detection sensors, and cloud connectivity, this robot can monitor your home remotely. It can patrol specified areas, stream live video to your smartphone, and send alerts if unusual activity is detected. This project is a practical introduction to home security systems, IoT, and real-time monitoring solutions. It's perfect for enhancing your home's security and gaining insights into remote surveillance technologies.
Environmental Monitoring Rover
Convert the DIY Mars Rover kit into an Environmental Monitoring Rover. Equip the rover with additional sensors to measure air quality, temperature, humidity, and other environmental parameters. This rover can autonomously navigate areas to collect environmental data, which can then be analyzed for research or awareness purposes. This project teaches about environmental science, data collection, and the practical application of sensor technologies. It’s especially useful for educational purposes, providing hands-on experience in environmental monitoring.
Follow Me Robot
Create a Follow Me Robot using the Mars Rover components by adding infrared or Bluetooth modules. This robot can be programmed to follow a person or object, maintaining a certain distance. This feature can be achieved through sensor data processing and dynamic movement adjustments. This project is an excellent way to understand the principles of object tracking, signal processing, and robotics control systems. It can be applied in scenarios such as automated shopping carts, personal assistants, and more.
Exploration Rover with Data Logging
Build an Exploration Rover with Data Logging capability. Enhance the Mars Rover with GPS for location tracking and data logging modules to record various sensor readings. This rover can be deployed in unfamiliar terrains to map out areas and collect data for analysis. By recording the data during its exploration missions, it can provide valuable information for further study. This project provides experience in data logging techniques, GPS usage, and exploratory robotics, making it suitable for research and educational explorations.
| Shipping Cost |
|
No reviews found!














































No comments found for this product. Be the first to comment!