ESP32-Powered Spider Robot for Robotics Learning
Learn how to build an ESP32-powered spider robot for robotics education. Explore autonomous navigation, obstacle avoidance, and hands-on programming with this project.
Robotics is an exciting and rapidly growing field, and the ESP32-powered spider robot offers a fantastic way for students and enthusiasts to dive into this fascinating world. This educational project allows users to design and program a six-legged spider robot powered by the versatile ESP32 microcontroller. The project focuses on autonomous navigation, obstacle detection, and avoidance, giving users hands-on experience in electronics, programming, and mechanical design.
By building and programming this spider robot, you will learn valuable skills in integrating hardware and software, which are essential for exploring more advanced robotics concepts. Whether you're a beginner or an experienced enthusiast, this project provides a comprehensive introduction to robotics.
Objectives of the Project
The main goals of the ESP32-Powered Spider Robot for Robotics Learning project are:


-
Develop a Six-Legged Spider Robot: Using the ESP32 microcontroller, you will design and assemble a robot with six legs capable of independent movement.
-
Program Autonomous Navigation: The robot will be programmed to autonomously navigate its environment by avoiding obstacles.
-
Hands-on Learning: Through this project, users will gain in-depth knowledge of electronics, robotics, and programming.
-
Foster Innovation: The project encourages experimentation and innovation in both robotic design and functionality.

-
Demonstrate Microcontroller Applications: It showcases the practical use of microcontrollers in robotics, providing real-world applications for theoretical concepts.


Key Features of the Spider Robot
-
Powerful ESP32 Microcontroller: At the heart of the robot is the ESP32, a powerful and versatile microcontroller offering Wi-Fi and Bluetooth connectivity.
-
Servo Motors for Precise Movements: The robot uses multiple servo motors that enable complex leg movements and walking patterns.
-
Ultrasonic Sensors for Obstacle Detection: The ultrasonic sensor helps the robot detect obstacles and navigate around them.
-
Open-Source Code: The code for this project is open-source, allowing users to customize and enhance the robot’s features.
-
Modular Design: The robot’s modular design makes it easy to assemble and modify, perfect for experimentation.
Application Areas
The ESP32-Powered Spider Robot is an excellent educational tool for a wide range of users, including:
- Students and Educators: Ideal for use in schools, colleges, and maker spaces to teach robotics concepts through a hands-on approach.
- Hobbyists and Enthusiasts: A great project for robotics enthusiasts to expand their knowledge of electronic design, programming, and mechanical engineering.
- Research Laboratories: This project can be used to explore autonomous systems and sensor integration, contributing to the advancement of robotics and automation.
- Small-Scale Robotics Applications: The project has potential applications in surveillance, environmental monitoring, and search-and-rescue missions.
Detailed Working of the ESP32-Powered Spider Robot
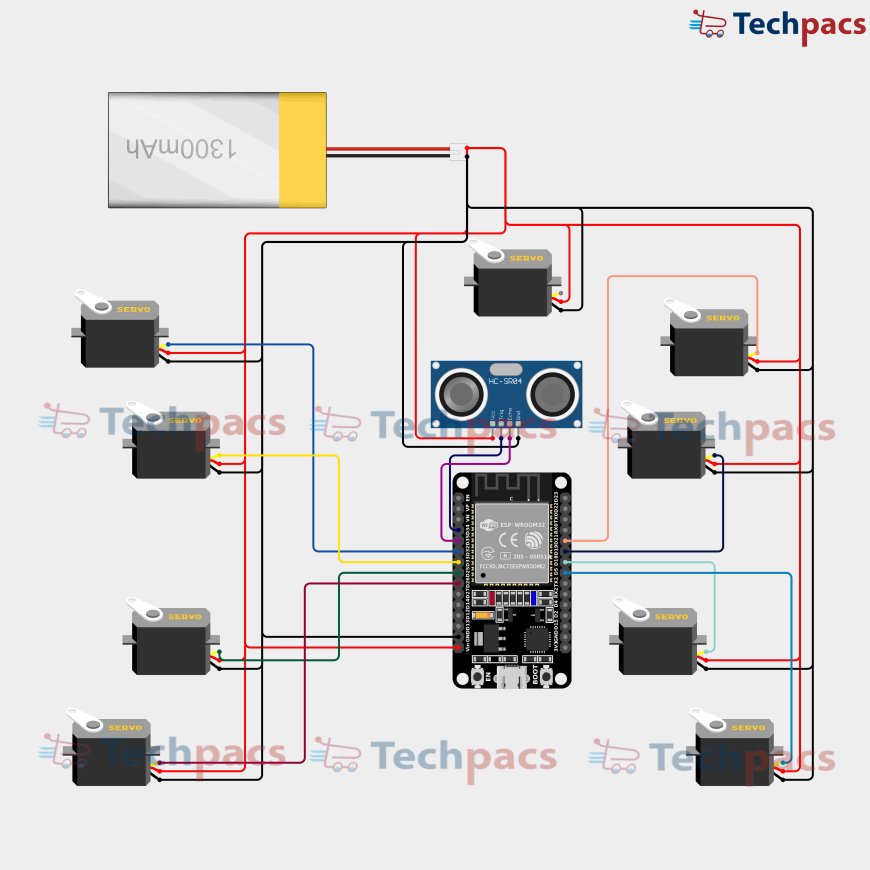
The robot’s ESP32 microcontroller is responsible for orchestrating all operations, from receiving sensor inputs to controlling servo motors for movement. The 1300mAh rechargeable battery powers the entire system, ensuring smooth and continuous operation.
Servo Motors: These motors are responsible for the robot's walking and turning movements. By controlling the motors' movements, the robot mimics the actions of a spider, navigating complex terrains.
Ultrasonic Sensor: The robot’s HC-SR04 ultrasonic sensor detects obstacles by emitting sound waves and measuring the time it takes for the sound to bounce back. The sensor data is sent to the ESP32, which uses this information to make real-time decisions and adjust the robot’s path.
Wi-Fi and Bluetooth Connectivity: Thanks to the ESP32’s Wi-Fi and Bluetooth capabilities, users can control the robot remotely via a smartphone or computer. This added feature enhances user interaction, making the learning experience even more engaging.
Programming: Using environments like Arduino IDE or ESP-IDF, users can write code that controls the robot’s behavior. This includes programming the robot’s reactions to obstacles, controlling servo movements, and navigating its environment. This aspect of the project offers valuable experience in coding and debugging.
Modules Used in the ESP32-Powered Spider Robot
-
Power Supply Module: This module includes the 1300mAh battery that provides the necessary power to all components of the robot, including the ESP32 and servo motors.
-
ESP32 Microcontroller Module: The ESP32 is the brain of the robot, handling all sensor inputs, controlling the servo motors, and managing the robot’s navigation and behavior.
-
Ultrasonic Sensor Module: The HC-SR04 ultrasonic sensor is crucial for detecting obstacles in the robot’s path, allowing it to adjust its course autonomously.
-
Servo Motor Module: Eight servo motors provide precise control over the robot’s leg movements, enabling it to walk and navigate.
-
Control and Communication Module: Using the ESP32’s Wi-Fi and Bluetooth capabilities, the robot can be controlled remotely, offering flexibility and interactivity.
Components Used in the ESP32-Powered Spider Robot
Power Module:
- Battery: 1300mAh Li-Po Battery
- Purpose: Powers the entire circuit, ensuring uninterrupted robot operation.
Control Module:
- ESP32 Board: The microcontroller that controls the entire robot, processes sensor data, and navigates the robot.
Actuation Module:
- Servo Motors x 8: These motors are responsible for the robot's leg movements and mobility.
Sensing Module:
- HC-SR04 Ultrasonic Sensor: Used for obstacle detection, ensuring the robot can navigate autonomously.
Other Possible Projects Using This Kit
-
ESP32-Powered Biped Robot: Reconfigure the servos to create a biped robot that can walk using human-like leg movements.
-
Autonomous Obstacle-Avoiding Robot Car: Build a robot car that uses an ultrasonic sensor to navigate around obstacles.
-
ESP32-Controlled Robotic Arm: Repurpose the servos to build a robotic arm capable of precise movements for tasks like object manipulation.
-
Voice-Controlled Home Automation System: Use the ESP32’s Wi-Fi capabilities to control home appliances via voice commands.
-
Interactive Light and Sound Show: Create a synchronized light and sound show using RGB LEDs and a speaker controlled by the ESP32.
Conclusion
The ESP32-Powered Spider Robot is not just a fascinating project but a comprehensive learning tool for anyone interested in robotics. By working with the ESP32 microcontroller, servo motors, and ultrasonic sensors, you will gain valuable skills in electronics, programming, and mechanical design. Whether you are a student, hobbyist, or researcher, this project offers endless possibilities for hands-on learning and experimentation.
This spider robot project opens the door to many advanced robotics applications, paving the way for exciting future projects and innovations.