


















"Innovative Maneuverability: The Future of Automotive Steering with Four-Wheels Control System"
Introduction
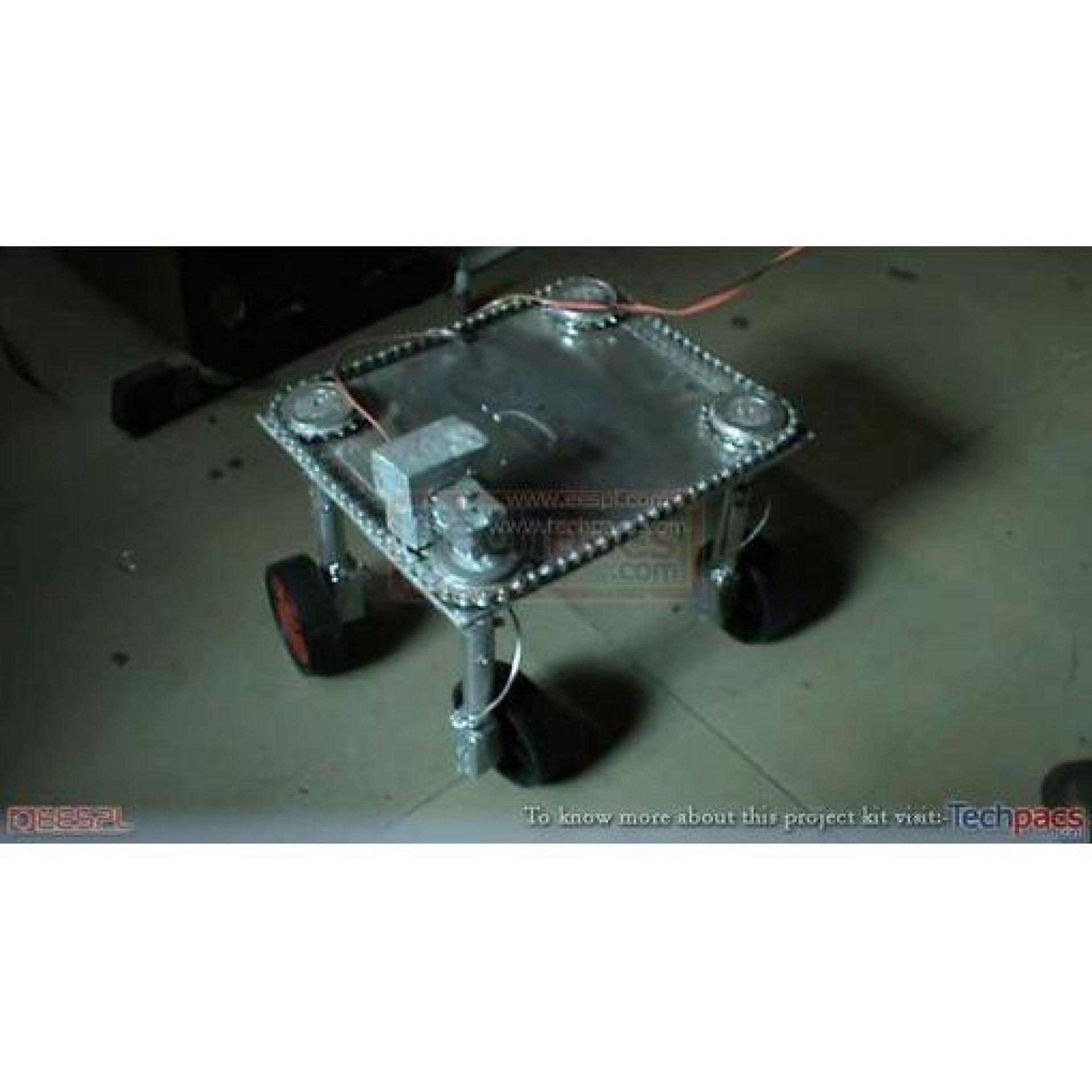
The Remote-Controlled Four Wheels Directional Synchronizer Steering System is a groundbreaking project that aims to enhance vehicular maneuverability through the implementation of a cutting-edge four-wheel steering mechanism. This innovative system goes beyond traditional front-wheel steering setups by enabling both the front and rear wheels to work in harmony or opposition, based on driving conditions.
By allowing the rear wheels to turn in conjunction with the front wheels at high speeds, the system ensures stability and control during lane changes, while at low speeds, the rear wheels can turn in the opposite direction to achieve sharper turns and reduce the vehicle's turning radius. This adaptability greatly improves the vehicle's efficiency in confined spaces, city driving, and low-speed maneuvers.
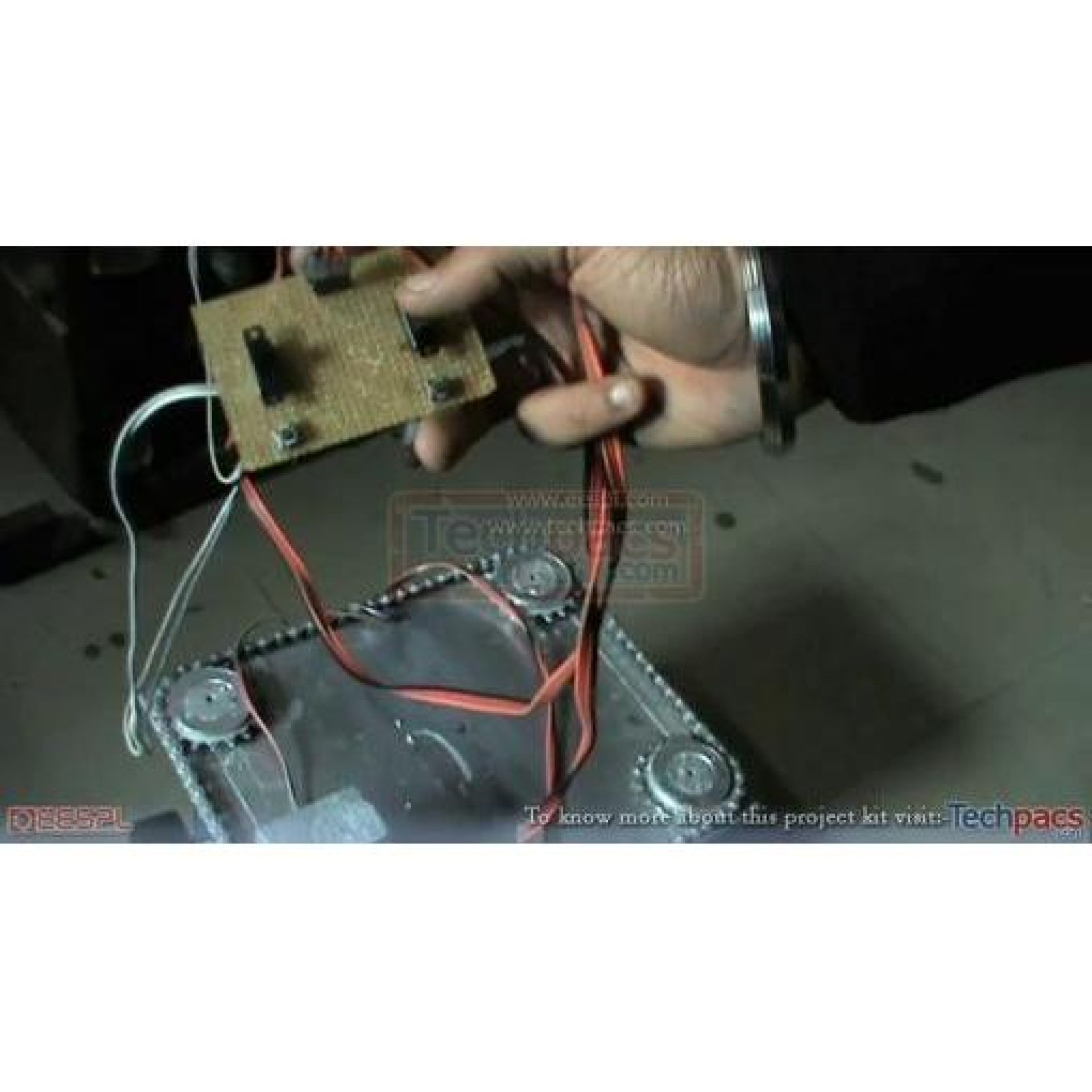
The project utilizes a range of modules, including a Regulated Power Supply, RFID Reader, Crank Shaft, Gear Drives, Pulleys, and DC Gear Motor to facilitate the seamless operation of the four-wheel steering system.
By integrating these components effectively, the project showcases the potential of combining mechanical and mechatronics engineering principles to enhance automotive technology.
Understandably, in conventional cars, the tendency to understeer can be a challenge for drivers, affecting the overall driving experience. The implementation of a four-wheel steering system addresses this issue, providing near-neutral steering and enhancing driver control under varying conditions. Furthermore, the system's ability to adapt to different driving scenarios, such as low-speed cornering, city driving, and parking in tight spaces, showcases its versatility and practicality in real-world applications.
In conclusion, the Remote-Controlled Four Wheels Directional Synchronizer Steering System represents a significant advancement in automotive technology, offering improved maneuverability, safety, and efficiency for drivers.
With its innovative design and emphasis on enhancing driving dynamics, this project sets a new standard for vehicle steering systems, paving the way for future advancements in the field of automobile engineering.
Applications
The Remote-Controlled Four Wheels Directional Synchronizer Steering System holds immense potential for diverse application areas across various sectors. In the automotive industry, the project could revolutionize vehicular maneuverability by enhancing the turning radius of vehicles, making parking, low-speed cornering, and high-speed lane changes more efficient and safer. By addressing the challenges faced by vehicles with higher wheelbase and track width in city driving conditions, the system could improve overall driving experience and safety. Additionally, the project's capability to provide near-neutral steering under varying operating conditions could benefit production cars by automatically compensating for understeer/oversteer issues, thereby offering drivers a more balanced and controlled driving experience. Beyond the automotive sector, the concept of four-wheel steering could also be applied in robotics for improved mobility and maneuverability of robotic systems.
Overall, the project's innovative features, such as synchronized steering of front and rear wheels, make it a versatile solution with the potential to have a significant impact in various fields, from automotive engineering to robotics and beyond.
Customization Options for Industries
The Remote-Controlled Four Wheels Directional Synchronizer Steering System offers a range of customization options that can benefit various industrial applications. In the automotive industry, this project's unique four-wheel steering mechanism can be adapted for different vehicle types, such as trucks, vans, or even autonomous vehicles, to improve maneuverability and enhance driving experience. Industries with a focus on logistics or transportation can utilize this system to optimize vehicle performance in tight spaces, loading docks, or urban environments with heavy traffic. Additionally, manufacturers in the robotics sector can incorporate the project's modules, such as RFID readers and DC gear motors, to develop advanced automated systems for material handling, warehouse operations, or collaborative robots. The scalability and adaptability of this project make it a versatile solution for industries seeking to improve efficiency, safety, and control in their operations.
Customization Options for Academics
The Remote-Controlled Four Wheel Directional Synchronizer Steering System project kit offers students a valuable opportunity to explore and understand the principles of four-wheel steering mechanisms used in the automobile industry. By utilizing modules such as the Regulated Power Supply, RFID Reader, Crank Shaft, Gear Drives, Pulleys, and DC Gear Motor, students can learn about the intricate components and functionality of a four-wheel steering system. Through hands-on experimentation and customization, students can gain practical skills in mechanical engineering, mechatronics, and robotics as they build and test their own four-wheel steering mechanism. Moreover, the versatility of this project kit allows students to undertake a wide range of projects, from optimizing steering efficiency in vehicles to designing autonomous steering systems for various applications. Potential project ideas could include creating a remote-controlled car with four-wheel steering capabilities for navigating tight spaces, developing a steering system for autonomous robots, or studying the effects of different steering configurations on vehicle performance.
Overall, this project kit serves as an excellent educational tool for students to explore the innovative technology behind four-wheel steering and enhance their engineering knowledge and skills.
Summary
The Remote-Controlled Four Wheels Directional Synchronizer Steering System revolutionizes vehicular maneuverability by enabling both front and rear wheels to work together or in opposition, enhancing stability, control, and efficiency. Using innovative modules and mechatronics principles, the system addresses understeering issues and provides near-neutral steering for drivers, improving overall driving experience. With applications in Automotive Engineering, Transport Technology, Smart Mobility, and Autonomous Vehicles, this project sets a new standard for vehicle steering systems, showcasing its practicality, versatility, and potential to shape the future of automobile engineering.
Technology Domains
Automobile,Mechanical & Mechatronics,Robotics
Technology Sub Domains
Core Mechanical & Fabrication based Projects,Gear Mechanisms & Cranck Shafts Based Projects,Mechatronics Based Projects,Breaking System Based Projects,speed Monitoring based Projects,Robotic Vehicle Based Projects
Keywords
Four-wheel steering, 360 degree steering, vehicle maneuverability, front wheel steering, rear wheel steering, turning efficiency, turning radius, parking efficiency, low speed cornering, high speed lane change, city driving conditions, wheelbase, track width, neutral steering, understeer, oversteer, remote-controlled steering system, variable four-wheel steering, regulated power supply, RFID reader, crank shaft, gear drives, pulleys, DC gear motor, automobile, mechanical, mechatronics, robotics
| Shipping Cost |
|
No reviews found!











































No comments found for this product. Be the first to comment!